上記のトピックの多くをカバーする最良の方法は、効率マッピングと試験イナモメーターモメーター試験です。誰もがシステムの効率を高めたいと考えています。これにはローデータを用意することが重要です。何か問題が発生した場合、以前のテストを参照でき、 nCode GlyphWorks や MATLAB などの後処理プログラムで詳細な分析も実行できるからです。さらに、これは動的試験において最も重要なことです。動的負荷や試験ドライブサイクルを実施する場合、生データがないと、奇妙な不正確な効率が発生する可能性があります。
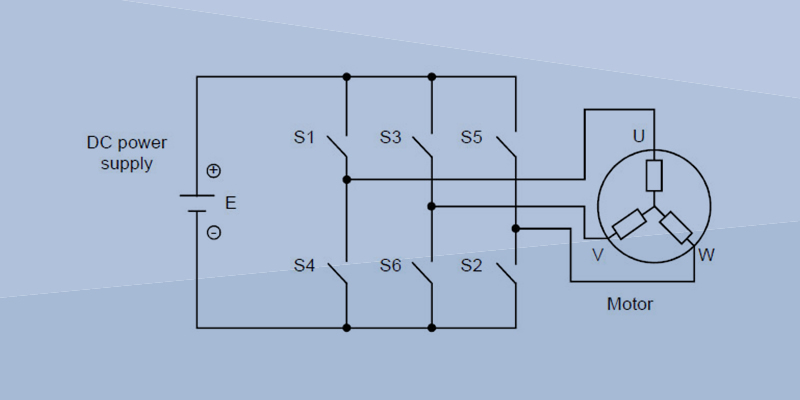
試験を開始すると、DCバス電圧が設定され、その後に速度も設定されます。
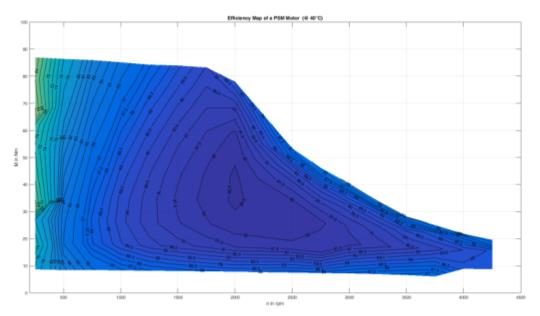
そして一定のトルクで機械に負荷をかけます。 マシンの範囲で使用可能なすべての望ましいトルクと速度に対して行います。これにより、すべての希望する設定ポイントに対する効率が得られ、効率マップを得ることができます。これらのポイントは、特定の温度範囲で測定されます。設定したポイントで測定を行うために、機械が冷えるまで待たなければならない場合もあります。 は、テストポイントを数秒ではなく数サイクルで取得することでマシンが加熱する時間を短縮できるため、お客様の時間を大幅に節約できます。
多くの場合、人々は機械の限界をテストし、基本的にはそれを壊そうと試みます。彼らは、自分の機械の機械的限界を知るために、最大速度を達成しようとします。データをトリガーし、バッファリングする能力は、研究者が機械がどこで故障したのかだけでなく、どのように故障したのかを理解するのに役立ちます。