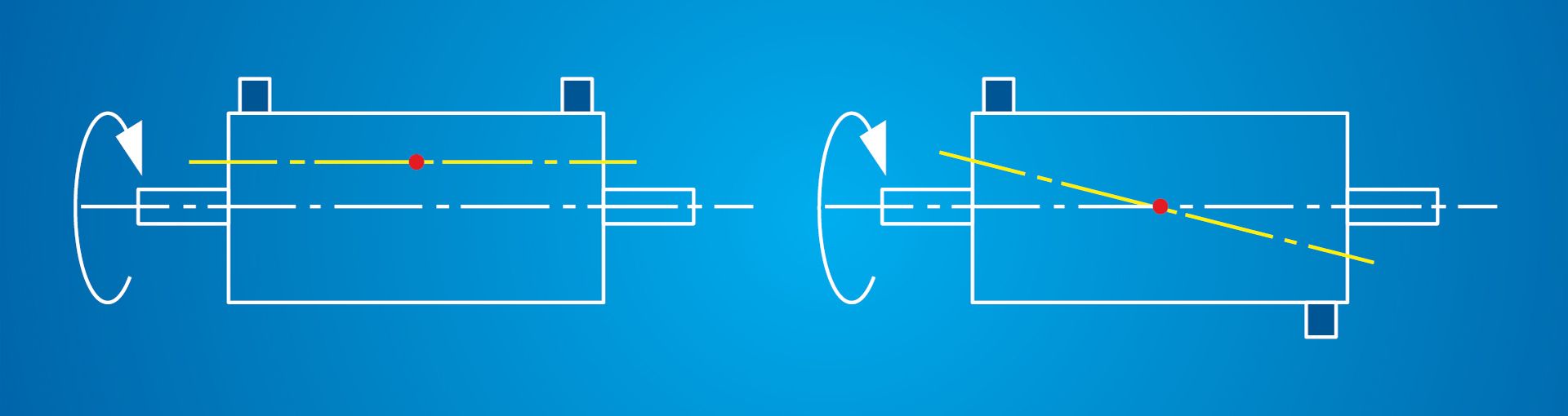
An object that imparts vibration to its bearings when it rotates is defined as "unbalanced". The bearing vibration is produced by the interaction of any unbalanced mass components present with the radial acceleration due to rotation which together generates a centrifugal force. As the mass components are rotating, the force rotates too and tries to move the object in its bearings along the line of action of the force. Hence any point on the bearing will experience a fluctuating force.
In practice, the force at a bearing will be made up of a primary force due to unbalanced mass components in or near to the plane of the bearing, and a secondary force due to unbalanced couple components from the other planes.
If an accelerometer is mounted on the bearing housing, the fluctuating vibration force can be detected, and an electrical signal sent to a vibration meter. The indicated vibration level is directly proportional to the resultant of the unbalanced masses.
The direction in which this resultant acts (i.e. the radius containing the centrifugal force) can be determined in an accurate way by comparing the phase of the fluctuating signal leaving the vibration meter with a standard periodic signal obtained from some datum position on the rotating object.
It is now possible to define the unbalance at the bearing by means of a vector.
The length is given by the magnitude of the unbalanced force (the measured vibration level) and the angle is given by the direction of action of the force. Further, if the resultant unbalanced force at a bearing can be resolved into its primary (first-order moments) and secondary (second-order moments) components, it will be possible to balance the object.