Der Elektromotor hat eine sehr wünschenswerte Drehmoment-Drehzahlkurve, da er nicht nur ein maximales Drehmoment bei einer Drehzahl von 0 erzeugen kann, sondern auch über einen weiten Drehzahlbereich. Diese Fähigkeit eröffnet dem Elektromotor zwar neue Möglichkeiten, bringt aber auch einige neue Herausforderungen im Vergleich zu Verbrennungsmotoren mit sich. Eine dieser Herausforderungen ist die Drehmomentwelligkeit, die verschiedene Auswirkungen hat, darunter Steuerung, Leistungsabgabe, Geräusch, Vibration und Haltbarkeit. Die Drehmomentwelligkeit kann als Varianz des Ausgangsdrehmoments beschrieben werden, wenn sich der Motor dreht. Dieses Whitepaper konzentriert sich auf die Messung dieser Signale und ihre Auswirkungen auf Lärm und Vibration. Das Papier wird auch Beispiele aus einigen Fallstudien enthalten, die die Auswirkungen von Drehmomentwelligkeit und ihre Auswirkungen auf NVH demonstrieren.
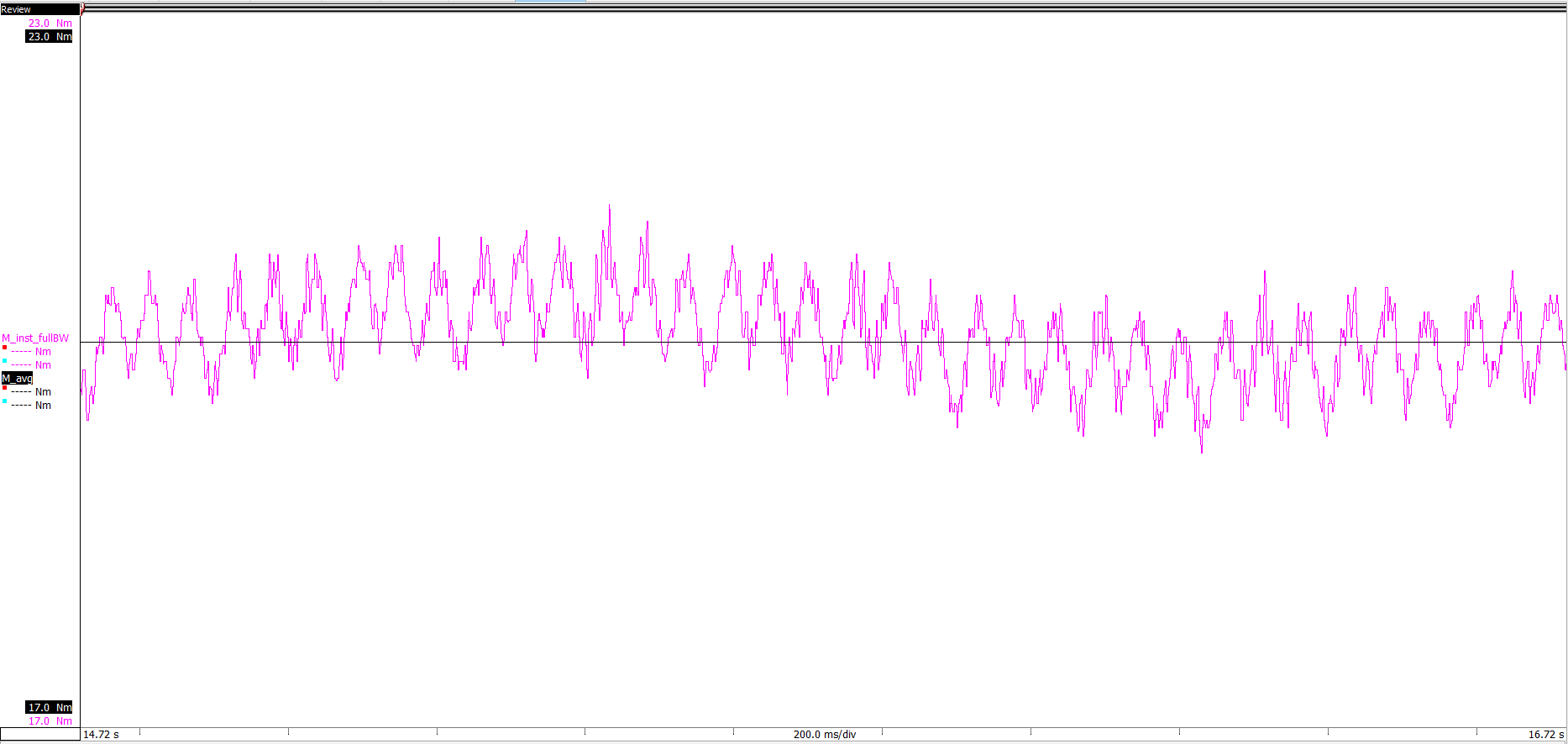
Das Drehmoment wird oft als Gleichstromgröße beschrieben, hat aber eine Frequenzkomponente. Insbesondere bei Elektromotoren hat das Drehmoment einen Gleichstromdurchschnitt mit einem zyklischen Offset. Dieser Offset wird eine Frequenz haben, die eine Funktion der Drehzahl ist, und eine Amplitude, die ein Prozentsatz des DC-Werts ist. Ein Beispiel für eine Drehmomentwelligkeit ist in Abbildung 1 zu sehen, wo das durchschnittliche Drehmoment ein Gleichstrom ist, das Drehmoment mit hoher Bandbreite jedoch eine Welligkeit von etwa +2 Nm aufweist. Das scheint zwar kein nennenswertes Problem zu sein, aber die hohen Frequenzen dieser Welligkeit können zu einer Vielzahl unerwünschter Folgen führen, darunter hörbare Geräusche, Strukturvibrationen und Ermüdung des Getriebes. Um die Drehmomentwelligkeit abzuschwächen, müssen wir ihre Quellen verstehen, zu denen elektrische Erregung, Maschinenkonstruktion, mechanische Resonanzen, Ausrichtung und Belastung gehören.
Die elektrische Erregung der Maschine trägt zur Drehmomentwelligkeit bei, da das Drehmoment der Maschine dem Strom folgt. Das extremste Beispiel hierfür ist die einphasige Maschine, bei der ein zyklisches Drehmoment mit dem Zweifachen der Grundfrequenz und ein Element ohne Drehmoment erzeugt wird. Durch Erhöhen der Phasen können Sie den Nulldurchgang und die Amplitude der Welligkeit eliminieren, aber Sie erhöhen die Frequenz. Die typische Maschine hat drei Phasen, was für die Drehmomentwelligkeit von Vorteil ist, sie aber nicht ausschließt.
Da das Drehmoment durch die sinusförmige Erregung erzeugt wird, hat die durch die Erregung verursachte Drehmomentwelligkeit dieselbe Frequenz wie das elektrische Signal, was bedeutet, dass mit steigender Geschwindigkeit auch die Drehmomentwelligkeitsfrequenz zunimmt. Darüber hinaus werden andere Elemente der Drehmomentwelligkeit vorhanden sein, da die Erregung keine perfekte Sinuswelle ist. Oft werden Wechselrichter verwendet, die mit einer hohen Frequenz arbeiten, und die Maschinenwicklung beeinflusst die Stromverteilung. Infolgedessen führen diese Probleme zu einer zusätzlichen Drehmomentwelligkeit.
Die Konstruktion ist ein weiteres Beispiel für einen Faktor, der die Drehmomentwelligkeit beeinflussen kann. Bei allen Maschinen wird die Drehmomentwelligkeit durch die Maschinenwicklungsfunktion angetrieben, und jeder Maschinentyp hat einen Beitrag zur Drehmomentwelligkeit, die von den Rotormagneten stammt, die mit dem Statoreisen zusammenwirken. Bei Induktionsmaschinen hat die Drehmomentwelligkeit eine geringere Amplitude und könnte mit der Schräglage der Rotorstäbe bewältigt werden. Bei zunehmender Nutzung von Permanentmagnetmaschinen müssen Sie neben der Wickelfunktion und der Schräglage auch die Auswirkungen der Magnete auf den Rotor berücksichtigen. Die Magnete am Rotor ziehen das Eisen am Stator an, und wenn sich die Maschine dreht, ziehen sich die Magnete an jedem Statorzahn an. Da es eine feste Anzahl von Rotormagneten und Statornuten gibt, ist dieses Element der Drehmomentwelligkeit auch proportional zur Geschwindigkeit. Aufgrund der hohen Amplitude und der potenziell hohen Frequenzen aufgrund der Geschwindigkeit der Maschine ist es schwierig, die Drehmomentwelligkeit von Permanentmagneten zu charakterisieren und zu reduzieren.
Da die Erregung und die Konstruktion der Maschine zu einer Drehmomentwelligkeit führen, können Sie diese beiden Funktionen auch in Kombination verwenden, um sie zu mildern. Verschiedene Konstruktionsmuster in Kombination mit verschiedenen Arten der Maschinensteuerung können verwendet werden, um die Drehmomentwelligkeit zu reduzieren. Fortschritte in der Rückkopplungs- und Invertertechnologie ermöglichen es uns, die Grenzen der Drehmomentwelligkeit zu überschreiten. Um zu bestätigen, dass diese Methoden zur Minderung der Drehmomentwelligkeit funktionieren, müssen die Ingenieure ihre Konstruktionen anhand von Messungen validieren.
Melden Sie sich jetzt an, um dieses Whitepaper herunterzuladen.
Dies vereint die Marken HBM, Brüel & Kjær, nCode, ReliaSoft und Discom und ermöglicht es Ihnen, schneller Innovationen für eine sauberere, gesündere und produktivere Welt zu schaffen.
Dies vereint die Marken HBM, Brüel & Kjær, nCode, ReliaSoft und Discom und ermöglicht es Ihnen, schneller Innovationen für eine sauberere, gesündere und produktivere Welt zu schaffen.
Dies vereint die Marken HBM, Brüel & Kjær, nCode, ReliaSoft und Discom und ermöglicht es Ihnen, schneller Innovationen für eine sauberere, gesündere und produktivere Welt zu schaffen.
Dies vereint die Marken HBM, Brüel & Kjær, nCode, ReliaSoft und Discom und ermöglicht es Ihnen, schneller Innovationen für eine sauberere, gesündere und produktivere Welt zu schaffen.
Dies vereint die Marken HBM, Brüel & Kjær, nCode, ReliaSoft und Discom und ermöglicht es Ihnen, schneller Innovationen für eine sauberere, gesündere und produktivere Welt zu schaffen.
