


août 29 2019
Understanding Source of Noise of Electric Engines
En savoir plus
Lors de la conception d’un système d’entraînement électrique, quelle que soit l’application, on retrouve trois éléments :
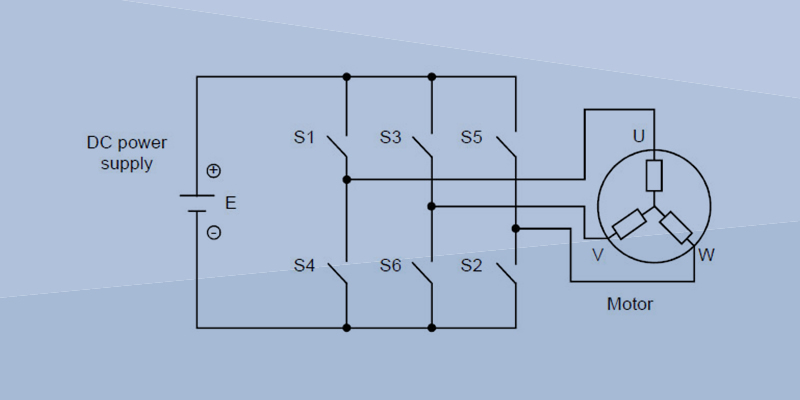
Le plus souvent, ces éléments prennent la forme d’une batterie servant de bus DC, d’un onduleur qui convertit la puissance DC en puissance AC, et d’un moteur qui utilise cette puissance AC pour transformer l’énergie électrique en puissance mécanique. On parle parfois de conversion de puissance électromécanique.
Dans cet article, Mitchell Marks explique les bases et les exigences liées aux essais des onduleurs et des machines électriques. Ce qu’il préfère dans cette application :
Les moteurs ont dominé le monde industriel pendant 100 ans sans véritable possibilité de les piloter, parce qu’ils étaient propres et fiables : il suffisait de les brancher pour qu’ils fonctionnent. Maintenant que nous avons la capacité de les commander, ils sont intégrés partout, des téléphones portables aux sous-marins. Avec autant d’applications, le travail ne s’arrêtera jamais et aucune journée ne se ressemblera.

La commande est un sujet sur lequel chacun reste généralement très discret quant à la manière exacte dont elle est mise en œuvre. Comme il s’agit d’un logiciel, il est relativement facile d’en préserver la confidentialité. Le contrôleur analyse le couple et la vitesse, puis détermine la fréquence de commutation, la méthode de modulation de largeur d’impulsion (PWM) et la manière d’optimiser le rendement. Ces paramètres peuvent évoluer très rapidement au cours d’un cycle. La plupart des stratégies de commande, quel que soit le type de moteur, reposent sur une variante de la commande orientée champ (FOC). Une tendance en forte croissance est la commande de courant Deadbeat, mais toutes les commandes resteront des commandes de courant en boucle fermée. C’est au niveau de la commande qu’intervient la transformation du repère direct-quadrature (dq0). Il s’agit d’une traduction mathématique destinée à visualiser et contrôler le PWM triphasé en fonction des besoins du système. Concrètement, il s’agit d’une manipulation sinus / cosinus avec une référence de position pour faire apparaître 3 phases comme 2, ce qui est loin d’être trivial.
The history of the math for controlling and understanding the induction machine took about 50 years for people to solve. It is amazing that we were using the machine 50 years before we could understand it!

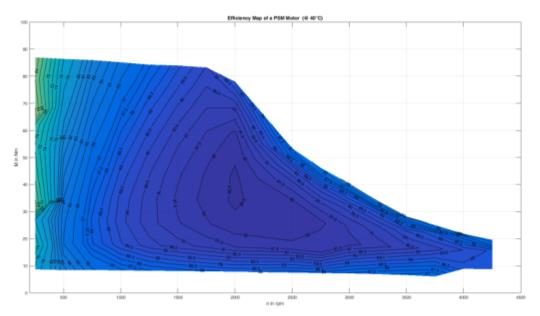
Ainsi, nous avons le choix de la topologie et des petits détails, en fonction du schéma de contrôle que les groupes souhaitent utiliser. Nous avons donc le choix de la topologie et de détails plus fins, en fonction du schéma de commande que les équipes souhaitent utiliser. Les principaux types de moteurs sont les moteurs à induction, à aimants permanents, à rotor bobiné et à réluctance commutée. Les moteurs à induction sont les plus faciles à commander, ce sont aussi ceux que nous connaissons le mieux, et ils constituent de véritables piliers de l’industrie ; leur inconvénient est toutefois que le champ doit être excité, ce qui génère des pertes. Les moteurs à aimants permanents (PM) sont largement utilisés dans les applications où le rendement est critique et où l’encombrement est limité, car ils offrent une densité de puissance plus élevée : l’aimant fournit le champ rotorique au lieu de générer des pertes dans le rotor. Ces moteurs PM nécessitent un onduleur, ainsi qu’un refroidissement important et beaucoup de précautions lorsqu’ils fonctionnent dans différents modes. Ils présentent aussi l’inconvénient d’une moindre capacité en rapport de vitesse à puissance constante (CPSR), car le champ ne peut pas être affaibli aussi facilement. L’affaiblissement de champ consiste à réduire le champ magnétique du rotor afin d’augmenter la vitesse d’une machine. Nous pouvons affaiblir le champ dans une machine à induction ou une machine PM en injectant un courant sur l’axe q. La nécessité de disposer de quantités contrôlées de courant sur l’axe q, utilisé pour piloter le couple, ou sur l’axe d, utilisé pour piloter le champ rotorique, dans le cadre de la FOC, explique pourquoi de nombreuses équipes souhaitent surveiller leurs courbes dq0 en temps réel. Avec une machine PM, des précautions supplémentaires doivent être prises, car les aimants peuvent se démagnétiser pendant l’affaiblissement de champ, et la force contre-électromotrice peut devoir être surveillée. Les moteurs synchrones à réluctance (SR) possèdent un rotor très simple, constitué uniquement d’un empilage de tôles selon une géométrie spécifique. Ces moteurs exploitent le couple de réluctance pour créer le mouvement de rotation. Ils sont très utiles dans diverses applications grâce à leur conception simple, mais présentent l’inconvénient de générer une quantité importante de bruit et de vibrations. C’est pourquoi ils n’ont été utilisés que dans des scénarios spécifiques. Lors des essais de ces machines, les chercheurs cherchent principalement à établir une cartographie vibratoire indiquant à quels niveaux de couple et de vitesse les vibrations sont les plus fortes.
Plus le moteur reste froid, plus les pertes sont faibles ; et plus les pertes sont faibles, plus le rendement est élevé.
De plus, si les aimants deviennent trop chauds, ils peuvent se démagnétiser dans certaines zones, ce qui peut être très problématique. Il est donc essentiel de maintenir les enroulements et les interrupteurs à basse température. Les interrupteurs génèrent davantage de pertes et peuvent même exploser s’ils deviennent trop chauds. Les chercheurs consacrent une part importante du temps de conception à explorer des stratégies de refroidissement pour améliorer le rendement de leurs machines. Les systèmes de refroidissement utilisent souvent de l’eau, de l’huile ou du glycol, pompés et pulvérisés sur les zones desquelles il faut extraire la chaleur. Les contraintes liées au refroidissement des machines ont fait du suivi de température du moteur un élément essentiel en fonctionnement comme en essais. Un essai comportera des thermocouples pour surveiller les températures, celles-ci étant enregistrées ou transmises à un système de commande pour arrêt. Le fait de disposer de ces valeurs enregistrées et synchronisées avec les données intéresse particulièrement les chercheurs, afin de savoir quand et où les variations de température se sont produites en réponse à leurs commandes. C’est un autre domaine dans lequel les données peuvent être utilisées pour la validation de modèles.
