本稿では、正弦波電圧を供給される誘導モータの準静的電気機械的特性決定用試験装置を示します。本稿では,試験装置,使用される機器とそこで実行され得る特性化試験について詳細に述べています。測定対象のモータは、別の速度制御されたモータで駆動され、制御の観点から特別な注意を必要とします。
提案された計測技術の ‘生産ライン上’ 特性は、極めて動的な電気駆動と、高いサンプリングレート、精度、および利用されるデータレコーダと収集システムの正確な同期性の両方によって可能となります。1.5 kW三相誘導モータと0.75 kW永久分割コンデンサ単相誘導モータに対する、提案された試験装置で得られた準静的電気機械的特性の例が報告されています。
大まかに言えば、誘導機の電気機械的特性は、電気/機械 量の関数として機械量を示します。考えられる全ての組み合わせの中で、電気機械的特性の最も有名な例は、確かに ”トルク対速度” または “トルク対電流” です。電気機械的特性は直ちに目で見てわかる機械性能を与え、その有用性は教育的、実用的な観点の両方から見ても強力です[1]。
誘導モータの電気機械的特性は、磁気的非線形性, ロータバーの表皮効果, 浮遊負荷損を考慮する、概ね洗練された方法を仮定したよく知られた等価回路を用いて演算され得ます[2],[3]。
他方、’実際の’ 特性が測定される必要がある場合には、(国際規格[4],[5]に準拠した)実験室での試験により電気機械的特性を直接決定することは、顕著な人的労力を伴い、非常に時間がかかり、かなり高価になり得ます。特に大型誘導モータの定格電圧における始動トルクと最大トルクの評価は典型的な例です。製造業者の実験室で設定された 電流/電力 制限のために、直接試験はしばしば低電圧で実施されます。結果として定格電気機械的特性は通常、トルクが供給電圧の2乗に比例することを考慮して外挿されます。
トルク対速度特性の全体を調査するためには通常加速試験が採用され、機械的負荷として大きなイナーシャ(慣性)が被測定モータ(Motor Under Test, MUT) [6]に接続されます。この慣性負荷によりモータの加速は、試験全体を通じて準静的運転モードを実証するのに十分ゆっくりなものになります。[2]では、著者らはこの試験がモータ軸に接続される最良の慣性を選択するために用いる方程式を提供することについて詳細に論じています。使用する慣性の大きさは、モーターのサイズに依存することは明らかです。また、加速試験中は全ての慣性が一定であり、被試験モータに電源供給するメインスイッチをオンにした後は、運転者は速度プロファイルを変更できません。
最近では現代の電気駆動装置のおかげで、測定対象の誘導モータを、アクティブブレーキとして機能し以下では ”駆動モータ(Driving Motor, DM)” と呼ばれる第2の電動機に接続してトルク対速度特性が決定され得ます[7]。実際、双方向コンバータから給電される場合、駆動モーターは速度およびトルクについて、その大きさと方向の両方を制御することが可能です。測定対象のモータの軸に所望の負荷トルクを課すために、駆動モータには通常回生運転モードが使用されます。この場合、テストベンチを用いて[4]に記載された定格負荷温度試験及び可変負荷試験を実施できますが、始動条件からプルアウトトルク (脱出トルク) までのトルク特性の範囲を十分に評価するには適していません。
このため著者らは、ゼロ速度から同期速度まで高精度かつハイダイナミックな軸速度を課す速度制御された駆動モータを用いた誘導機の電気機械的特性計測用試験装置を本稿で提示しています。課せられた速度プロファイルの各ポイントにおいて、提案された駆動モータの制御ソリューションと、優れたサンプリングレートと精度で全ての電気量・機械量を同時収録することにより、全ての機械特性評価が迅速に実行され得ます。
検討された事例研究では、5-10秒で非常に良い結果が得られました。それゆえ提案された試験装置は、特に小型および中型の誘導モータに対して、生産ラインのラインエンドで ‘生産ライン上’ 検証試験を実行することができます。本稿は以下のように構成されています。提案された試験装置は第II節で詳述され、駆動モータの制御戦略は第III節で分析されています。提案された試験装置の特徴は、三相誘導モータと永久分割コンデンサ単相誘導モータそれぞれを考慮したケーススタディとして、第IV節と第V節で論じられます。
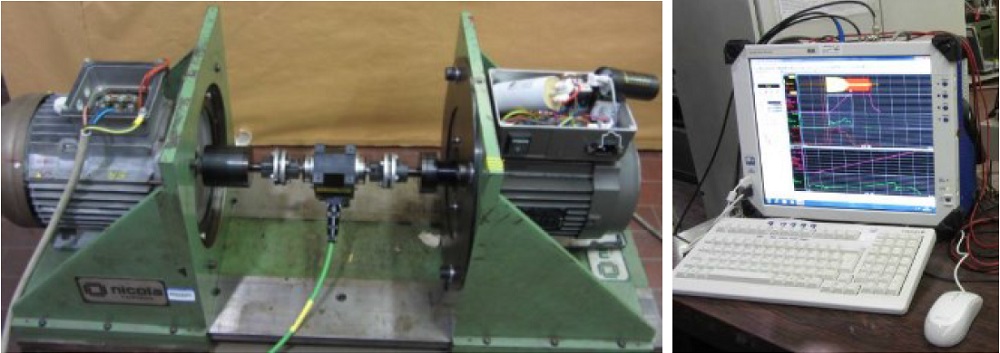
提案された試験装置は、図1の概略ブロックに示されるように、かなり複雑で、いくつかの部品から構成されています。図2左側にも示される様に、被試験モータと駆動モータは、垂直板を用いて機械的支持に取り付けられ、それらの軸はトルクトランスデューサを介して連結されます。機械構造と継手は、試験中に生じる機械的応力に耐えられる必要があるのは明らかです。
測定されたトルク信号は測定目的のために収録されますが、次節で述べられる様に駆動モータ速度制御システムにも提供されます。採用されたトルクメータ (vibro-meter社製TM208) の主要特性は以下の通りです: 定格トルク20Nm, 過負荷トルク40Nm, 精度0.1%, 帯域幅1kHz駆動モータは、試験に必要とされるトルクと速度を提供できるのであればどのような電動機でも構いません。提案された試験装置では、駆動モータは2.2 kW, 14 Nm @ 1500 rpmの同期リラクタンス(SyncRel)モータで、制動能力のあるPWMインバータによって給電されます。駆動モータは、dSPACE社製 DS1104制御ユニットにより速度制御されます。一部のテストでは電圧制御するために、測定対象モータには正弦波電源から電源供給されます。
試験装置の主要部は図2 (右側) に示された、 HBK社製 GEN3i データレコーダで得られるデータ収集システムです。 title HBK社製データレコーダ GEN3i とトランジェントレコーダへの内部リンクtitle GEN3i データレコーダ は、2 MS/s連続データ収集で絶縁12チャネル同期収録することができます。優れた連続サンプリングレートと測定精度により、短期間、つまり過渡現象のどのような情報も損なうことなく長期間にわたりデータ収録することができます。
GEN3iデータレコーダによる測定量は以下です:
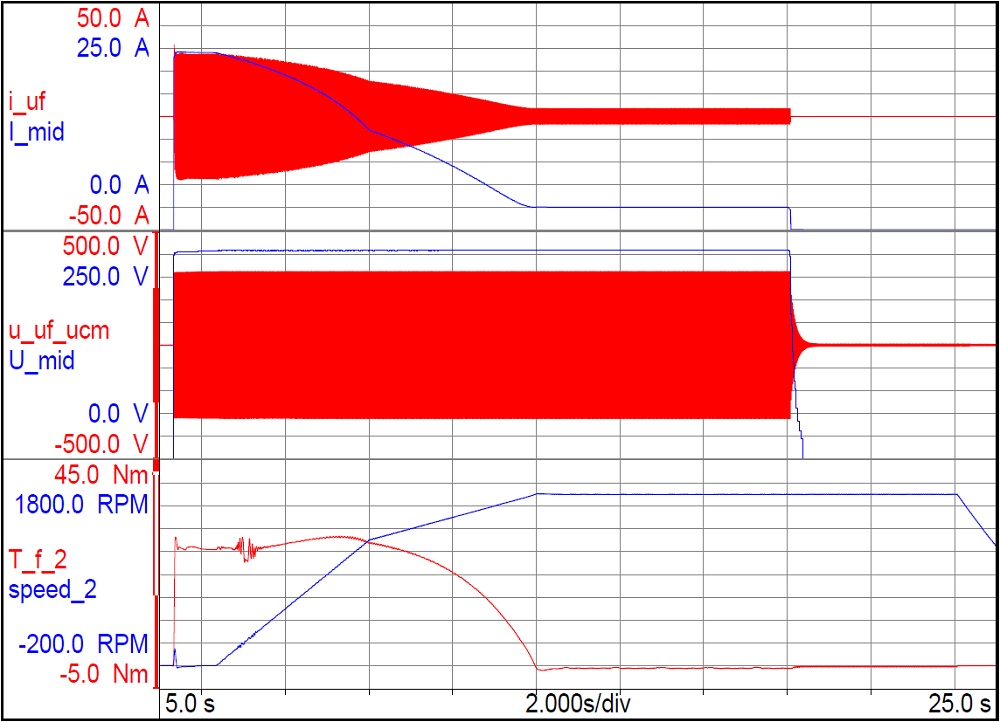
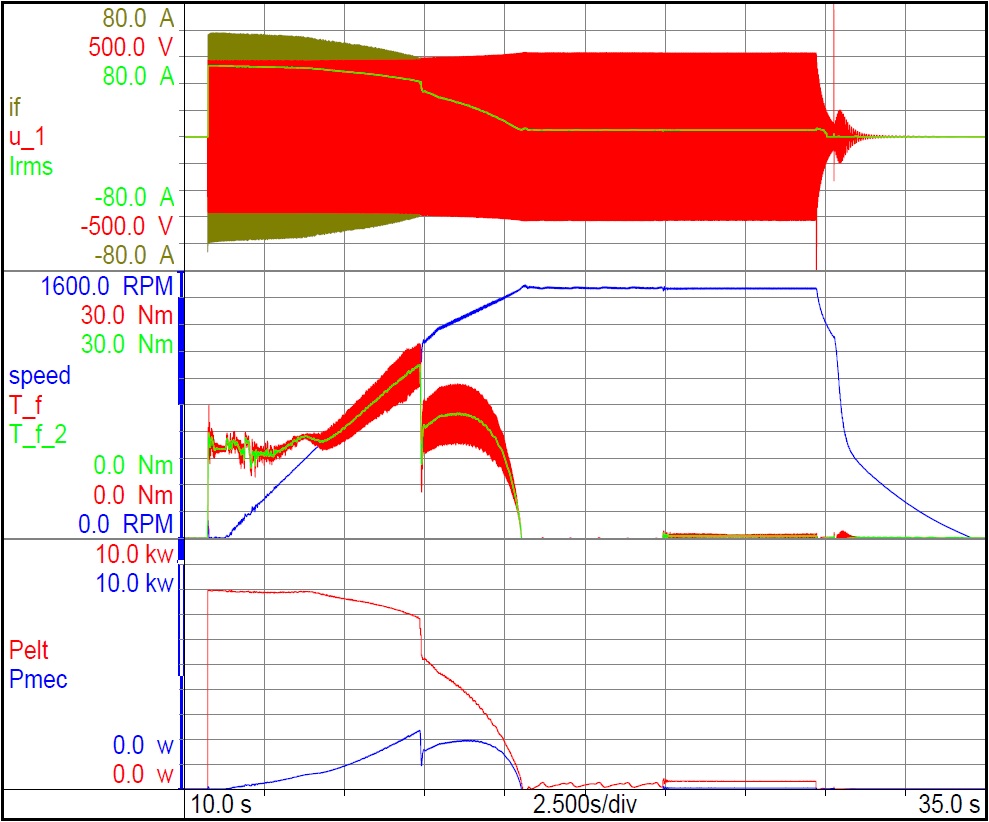
この高速データ収集システムによりもたらされる特徴の一例を示すために、三相誘導モータのトルク対速度特性を決定するために必要な 電気量と機械量の取得値を図3に示します。高速収集能力に加え、本データレコーダにはデータフィルタリングや数学的演算機能を多数提供しています。
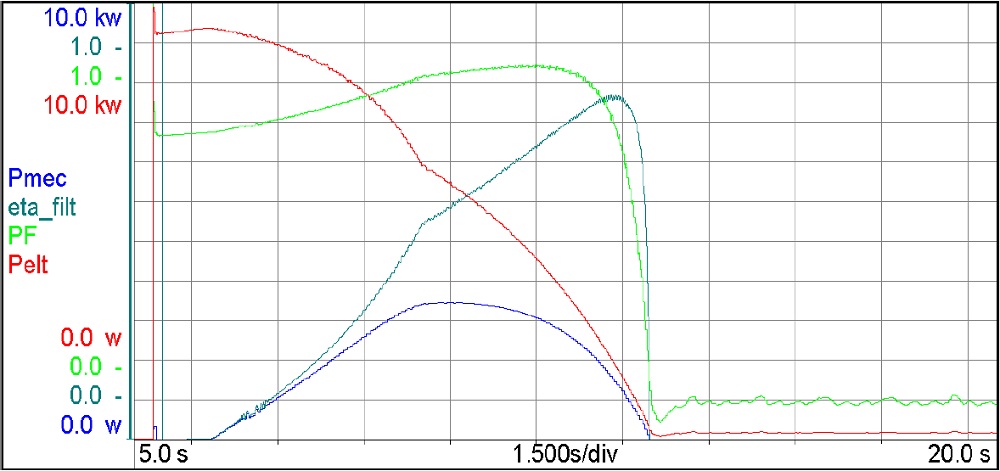
管理対象のデータ量を考慮すると、必要とされた、フィルターをかけられた量を収集システムから直接抽出するためには、これらの特徴が必須です[8]。例として、三相誘導モータの始動中に演算される量のいくつかを図4に報告します。良い結果を得るためには、高速データ収集システムは、被試験モータに負荷をかけるために用いられ、非常に良い動特性を持つ駆動モータ システム と組み合わされていなければなりません。このため、駆動モータの特性と性能について次の章で示され、詳細に説明されています。
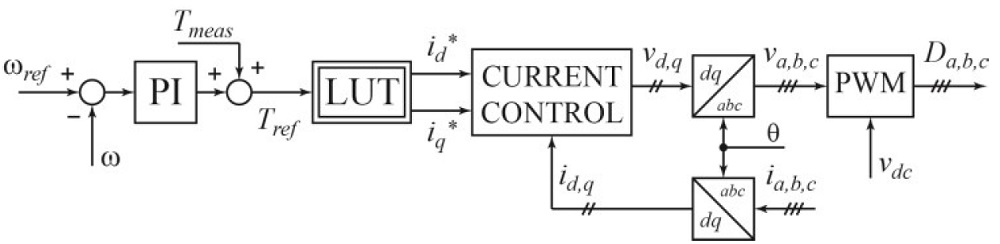
前章で既に述べたように、駆動モータは速度制御された同期リラクタンス(SyncRel)モータであり、その制御方式は図5に示されます。速度制御ループは、同期(d,q)ロータフレームにより実行されるベクトル制御方式の外側のループを表します。
参照速度は、(後述される) 特殊な速度プロファイルを課せられ、速度フィードバックは512パルス/revのエンコーダを用いて測定されます (図1) 。速度コントローラは比例積分 (PI) レギュレータで、フィードフォワード方式で最終的な参照トルク Tref を得るために、出力が測定トルクに加算されます。図5に示されるように、参照トルクは 2次元ルックアップテーブル (LUT) の入力であり、その出力は、(d,q)ロータフレームにより実行される標準的な内側のループの電流制御方式で採用される、参照d軸電流および参照q軸電流です。
試験装置の性能 は、定格パラメータが 表I に記載された小型の 三相誘導モータ を試験することにより評価されてきました。以下では、三相誘導モータで実施された各種試験について詳述されています。
被試験モータに定格電圧が供給されている間に、駆動モータの速度制御方式に特定の参照ランプ速度を課すことで、トルク特性を容易に決定されます。被試験モータに準静的動作条件を課すためには、ランプ速度には低い加速度値が望まれますが、ランプ時間は長くなります。同時に、試験中における被試験モータ温度の見過ごせない上昇を避けるため、ランプ時間は制限されなくてはなりません。
| 出力 (W) | 1500 |
| 電圧 (V) | 400 |
| 電流 (A) | 3.8 |
| 周波数 ( Hz) | 50 |
| 極数 | 4 |
| 速度 (rpm) | 1405 |
| トルク (Nm) | 10.2 |
| 始動トルク (Nm) | 19.8 |
| 最大トルク (Nm) | 26.4 |
表1試験された三相誘導モータの定格データ
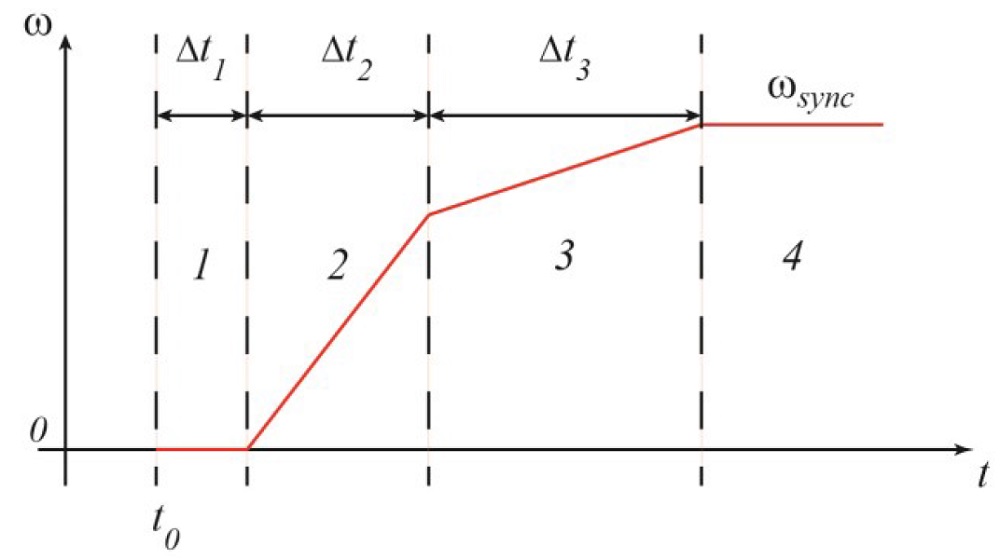
したがって、準静的状態と試験中の被試験モータの温度上昇との間の合理的な妥協点として、ランプ速度長が選択される必要があります。このため著者らは、図6に示すように、2つの異なる加速度を持った、2つの異なる区間を含む速度プロファイルを採用しました。
特に、ゼロ速度からプルアウトトルク (脱出トルク) に相当する速度値まではより速いランプ速度が用いられる一方、同期速度に達するためにより遅いランプ速度が定義されています。こうすることで、より良い準静的状態がトルク対速度特性の安定部において得られます。試験中の速度変動を避けることは非常に重要です。これは前節で説明したように駆動モータの速度制御動特性が高い場合にのみ可能となります。
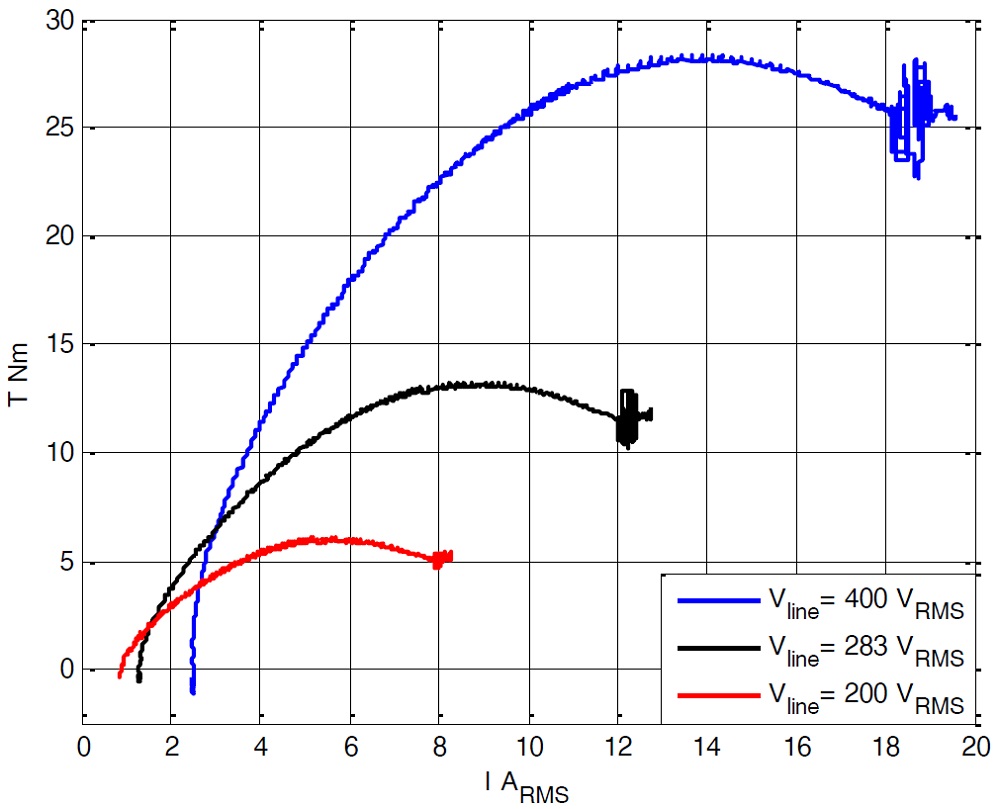
図6に関して、被試験モータは時刻t0で電源供給され、時間間隔Δt1の間駆動モータによってゼロ速度で固定されていることに注意する必要もあります。この時間間隔のおかげで、電源スイッチ投入後の過渡現象が消滅したときの電動機の ’真の’ 始動トルクが測定できます。3つの異なる供給電圧値に対するトルク対速度特性とトルク対電流特性がそれぞれ図7と図8に報告されます。供給電圧の異なる3つの始動試験は、周囲温度における電動機で間断なく実施されました。図7と図8で報告された特性から、トルクは供給電圧の二乗に比例することがかなり高い評価を受けていると理解することができます。
拘束試験は、誘導モータ等価回路パラメータ決定に必要な標準的な試験の一つです。提案された試験装置を用い、駆動モータ速度制御にゼロ速度を課すことで、本試験は容易に実施され得ます。測定対象モータはトルクメータに接続されているため、低電圧 (拘束電圧) における始動トルクも測定され得ます。
駆動モータにより機械損と風損が補償されるため、この試験によって 励磁電流と鉄損を優れた精度で決定する ことができます。試験は、駆動モータに被試験モータの同期速度と等しい機械速度を課すことによって実行され、この場合被試験モータのすべりはゼロになります。
被試験モータの真のすべりゼロを得るには、駆動モータ供給周波数が被試験モータの供給周波数と等しくなければなりません。この条件は、駆動モータの出力周波数を主電源周波数とPLLによりリンクすることで得られます。完全にゼロと等しくはないすべりは鉄損の誤評価によるロータ損失をもたらすため、等周波数条件が保証できない他のソリューションも使用されてはなりません。
効率試験は誘導モータの効率決定に用いられる長時間試験です[4]。本試験中では、被試験モータに定格トルクを課すためのブレーキとして駆動モータが用いられます。テストベンチで用いられる回生駆動のおかげで、軸出力はグリッドで回収され、全システム損失のみが供給される必要があります。熱試験の最後に、規格[10]-[12]で課せられた負荷トルクプロファイルを印加した、可変負荷試験を実行するよう駆動モータはプログラムされ得ます。漂遊負荷損を推定するためには変動負荷試験が必要です。
寒冷条件に関する電気機械的特性への温度影響を評価するために、定格負荷温度試験の終わりに加速試験が迅速に繰り返されることができます。検討した三相誘導モータに関しては、(温度試験の終わりに測定した) ステータ巻線温度が約25℃と105℃ それぞれに対する、温度によるトルク変動が図9に報告されています。
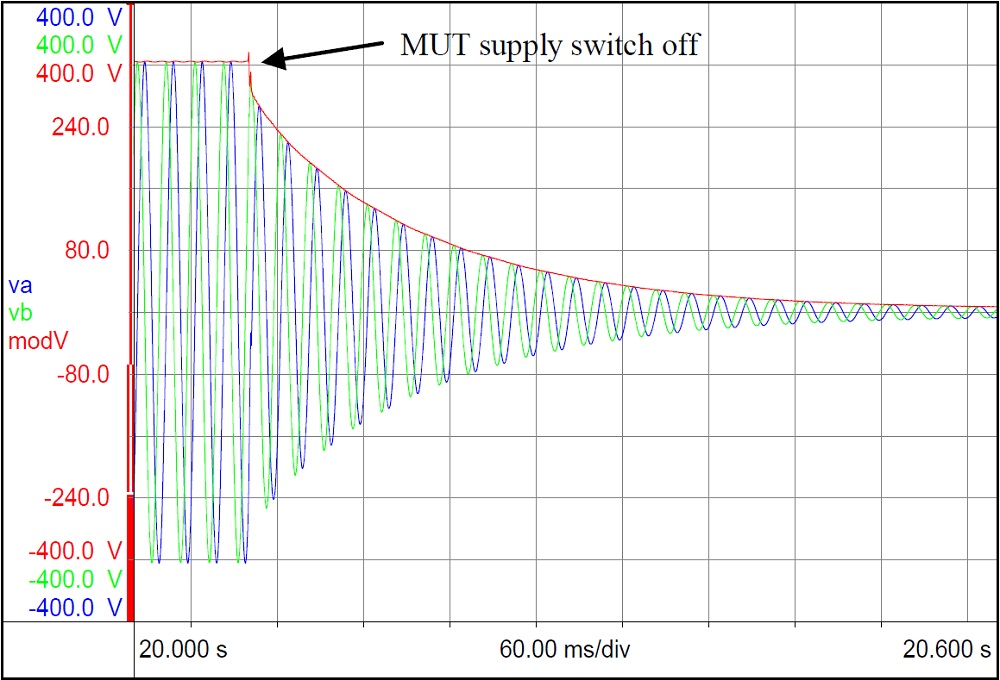
ロータ時定数は、高性能誘導モータベクトル制御におけるロータ磁束推定の重要なパラメータです[13]。本試験は、同期速度における無負荷試験と同一運転条件にて実施され得ます。駆動モータは速度制御され、被試験モータにすべりゼロを課します。被試験モータが同期条件で動作し、その定格電圧が供給されている間は、メインスイッチはオフです。データ収集システムは、被試験モータの端子電圧を保存するために用いられます。
この電圧は、メインスイッチが ”ON” 位置にある場合は供給電圧と等しくなりますが、メインスイッチが ”OFF” 位置にある場合には、ロータ磁束により生じるステータ起電力 (Electro-Motive Force, EMF) と等しくなります。EMF振幅はロータ時定数で定義される一次系として減衰します。ロータ時定数が稼働状態に非常に近い電磁条件で評価されるため、ステータEMF波形の包絡線は、優れた精度でロータ時定数を評価することを可能にします。実際この方法で計算された時定数は、拘束試験から得られるロータパラメーター値を用いて計算される場合に起こるような、ロータ電流の表皮効果の影響を受けません。
古典的な無負荷試験は、誘導モータの等価回路パラメータ決定に使用される標準的な試験のひとつです。試験中、モータ軸に機械的負荷が接続されること無くモータは自由に回転されなければならないため、この試験には提案された試験装置が必要というわけではありません。この試験を行うためには、被試験モータはトルクメータと駆動モータシャフトから機械的に切り離されていなければなりません。データ収集システムは今もなお、測定の時間間隔を被試験モータに印加された供給電圧と同期させて使用されています。
本試験装置は単相誘導モータの電気機械的特性の測定にも使用されています。特に、試験した電動機は表Ⅱで報告された銘板データを持つ永久分割コンデンサ単相誘導モータです。単相モータでは10秒間継続するランプ速度(0 - 1500rpm)を使用しています。この速度ランプにて測定された電気機械的特性は図11に示され、トルク対速度特性及びトルク対電流特性は図12に示されます。
被試験モータの始動中、二次巻線に接続されたコンデンサの静電容量値は、自動的に490 μF (始動時) から30 μF (通常動作状態) に変化します。予想通り、静電容量変動はトルク特性の形状変化を伴います。図12で明確に強調されるように、トルク遷移は始動コンデンサからランコンデンサへの切り替えが原因です。遷移は、より低い静電容量値に対応する最大トルクに近い速度で発生します。特筆すべき点として、本データ収集システムは、この突発的な現象を特段の問題なく捉えることができ、単相機の全速度範囲における性能について満足のいく結果を提供しました。
[1] Buinac, V. Tomljenovic, “Determination of the torque-speed characteristic of induction motor in electric machinery education”, Conf.Rec IEEE MIPRO’13, 2013, pp. 765-769
[2] I. Boldea, S. A.Nasar, “The induction Machine Handbook”, CRC Press, ISBN 0-8493-0004-5.
[3] A. Boglietti, A. Cavagnino, , L. Ferraris, M. Lazzari, “Induction Motor Equivalent Circuit Including the Stray Load Losses in the Machine Power Balance”, IEEE Trans.Energy Conversion, Vol. 23, No. 3, Sept. 2008, pp. 796-803.
[4] IEEE Standard, “Test Procedure for Polyphase Induction Motors and Generators” (ANSI), IEEE Std.112-2004.
[5] IEEE Standard, “Test Procedure for Single-Phase Induction Motors”, IEEE Std 114-201.0.
[6] R. Cipin, M. Patocka, J. Vondrus, “Acceleration method of the IM torque-speed characteristics measurement”, Conf.Rec.IEEE POWERENG’11 , 2011 , pp. 1-5.
[7] “Line Regen Motor Test Dynos”, Baldor technical literature
[8] B. Szabados, J. H.Dableh, R. D.Findlay, G.M.Obermeyer, R. E.Draper, “Measurement of the torque-speed characteristics of induction motors using an improved new digital approach”, IEEE Trans.Energy Conversion, vol. 5, Sep.1990, pp. 565-571.
[9] E. Armando, I.R.Bojoi, P. Guglielmi, G. Pellegrino and M. Pastorelli, “Experimental Identification of the Magnetic Model of Synchronous Machines”, IEEE Tran.On Ind.Applicat., Vol. 49, Issue 5, 2013, 2116- 2125.
[10] A. Boglietti, A. Cavagnino, S. Vaschetto, “Induction motor EU standards for efficiency evaluation:The scenario after IEC 60034-2-1”, Conf.Rec.IEEE-IECON 2011, pp, 2786 – 2791.
[11] A. Boglietti, A. Cavagnino, M. Lazzari, M. Pastorelli, “Induction Motor Efficiency Measurements in Accordance to IEEE 112B, IEC 34-2, JEC 37 International Standards”, Conf.Rec.IEEE-IEMDC’03, 2003, ISBN 0-7803-7818-0, pp. 1599-1605.
[12] A. Boglietti, A.Cavagnino, M.Lazzari, M.Pastorelli, “International standards for the Induction Motor Efficiency Evaluation:A Critical Analysis of the Stray-Load Loss Determination”, IEEE Trans.Ind.Applicat., Vol.40, No.5, September/October 2004, pp.1294-1301.
[13] D.W.Novotny and T.A.Lipo, “Vector Control and Dynamics of AC Drives”, Clarendon Press Oxford, 1996.
This will bring together HBM, Brüel & Kjær, nCode, ReliaSoft, MicroStrain and Discom brands, helping you innovate faster for a cleaner, healthier, and more productive world.