
Las baterías de iones de litio que se utilizan como fuentes de energía en los vehículos a motor consisten en celdas de iones de litio generalmente con ánodos de grafito. Cuando la batería se recarga, se almacenan iones de litio en esos ánodos de grafito, lo que conlleva un aumento de volumen.
En 2014, Florian Grimsmann describió un método para medir los cambios en el espesor de la celda durante los procesos de carga y descarga. También fue capaz de medir variaciones en las dimensiones de las celdas de una batería asociadas a cambios irreversibles en el espesor (por deposición de litio metálico o lithium plating), a temperaturas muy bajas o en presencia de corrientes de carga muy altas.
Por tanto, los ciclos de carga y descarga de una batería de iones de litio producen efectos mecánicos tanto reversibles como irreversibles. Últimamente existe un interés creciente por medir las variaciones en las dimensiones de las celdas de las baterías, las fuerzas resultantes de los ciclos de carga y descarga, y el efecto de la deposición de litio metálico.
Existen sensores capaces de medir estas fuerzas de manera fiable, y de funcionar con seguridad incluso en condiciones ambientales desfavorables y durante periodos muy largos. Cuando se somete una celda a un ensayo de este tipo, se conecta en serie con el transductor de fuerza.
Los ensayos mecánicos de baterías suelen llevarse a cabo en condiciones de temperatura controladas con precisión; por ejemplo, en cámaras climáticas que pueden alcanzar temperaturas de menos de 0 °C o de hasta 80 °C.
Aparte de fuerzas, durante los ciclos de carga y descarga también se desprende calor. Es de esperar que este gradiente de temperatura afecte al transductor de fuerza, que está en contacto mecánico directo con la muestras objeto del ensayo. Los ensayos pueden durar mucho tiempo, sin la posibilidad de hacer una puesta a cero de la cadena de medida. Además, deben detectarse de manera fiable variaciones de fuerza pequeñas, por lo que es importante que la incertidumbre de medida sea reducida.
Asimismo, se suelen medir y registrar otras variables, como la corriente y la tensión eléctrica o el desplazamiento (deformación de las celdas). Igualmente, la información sobre la temperatura es significativa.
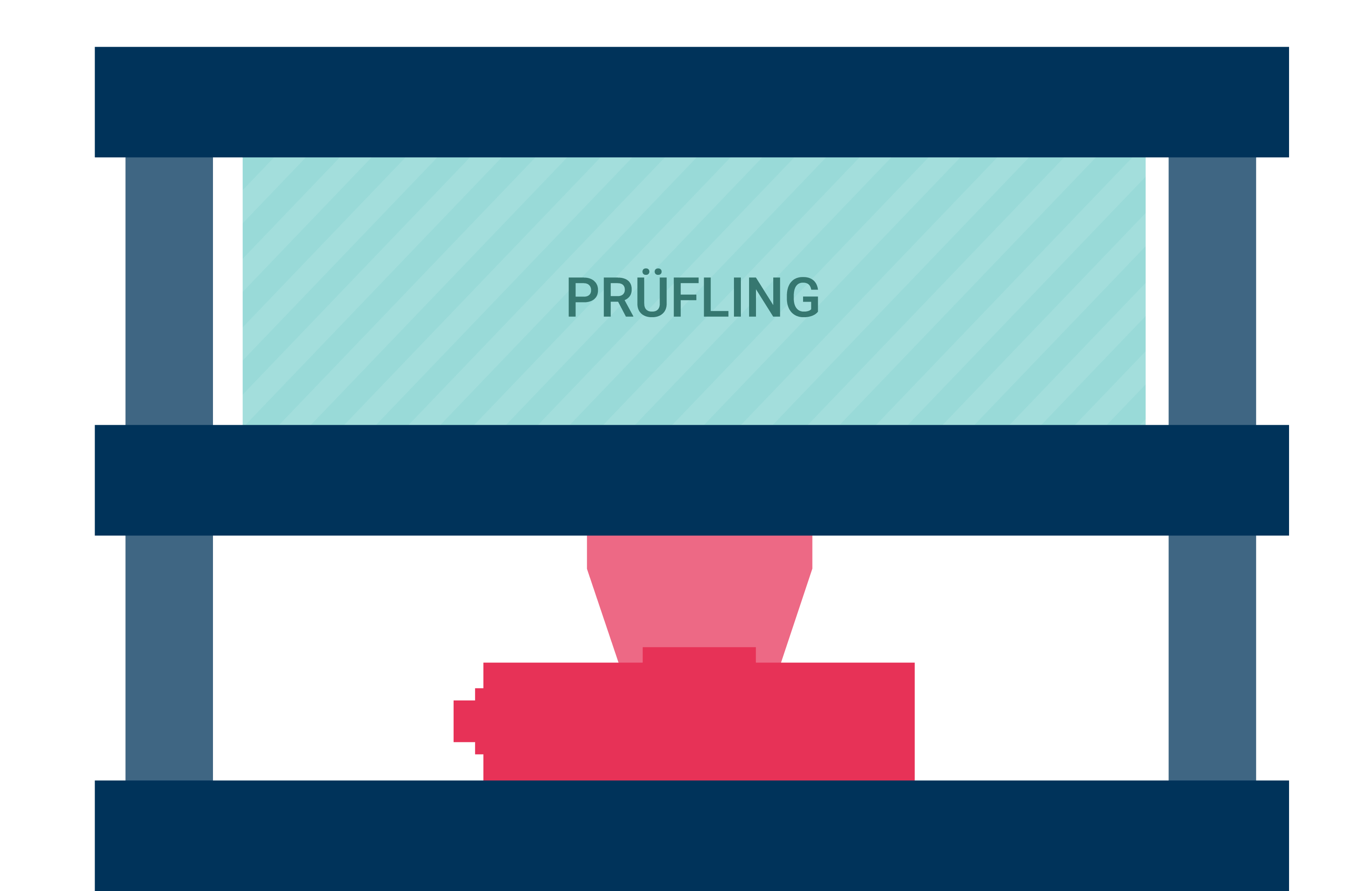
La configuración mecánica típica consiste en un marco de fuerza. La celda objeto del ensayo se conecta mecánicamente a un transductor de fuerza que se encarga de medir la deformación. Es necesario imponer altas exigencias a la rigidez del marco. En la figura siguiente se muestra un ejemplo de configuración.
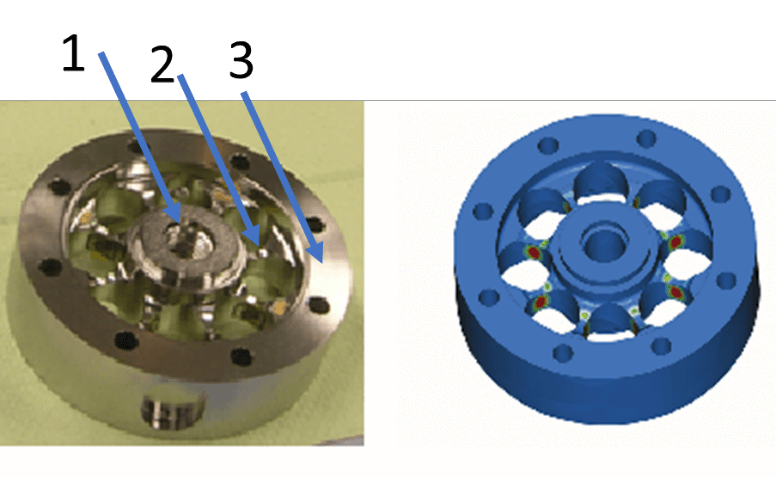
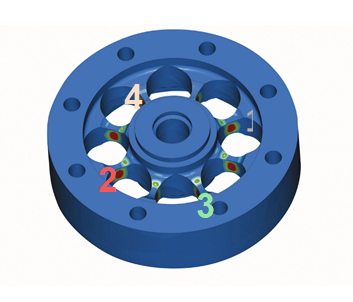
La Figura 2 muestra una fotografía y un modelo de elementos finitos del cuerpo de medición de un transductor de fuerza de cizallamiento con simetría radial (se utiliza como ejemplo un transductor U10M).
La fuerza se introduce en la rosca central interior del U10M [1] y se transmite a la brida exterior [3] a través de los radios [2]. Esta brida exterior puede atornillarse a un adaptador o montarse directamente en un elemento constructivo (Fig. 1).

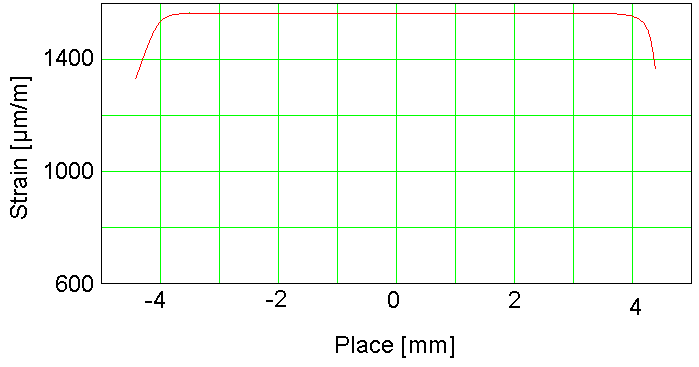
La aplicación de la fuerza produce una tensión mecánica en los radios que, a su vez, da lugar a una deformación. Las galgas extensométricas están instaladas formando un ángulo de 45º, para medir la deformación resultante de la tensión de cizallamiento. El diagrama de la Figura 4 muestra el campo de deformación. No importa en qué punto de la rejilla de medición se produzca la deformación, lo cual favorece el uso de las galgas extensométricas.
Tampoco se producen máximos de deformación llamativos, a diferencia de lo que ocurre con otros principios de medición. El daño a las galgas extensométricas se produce debido a la tensión más alta. De modo que el campo de deformación que puede obtenerse utilizando el principio de la fuerza de cizallamiento es especialmente favorable al uso de galgas extensométricas.
El modelo FEM muestra que, cuando se aplica una fuerza, solo se produce deformación en las zonas en las que hemos instalado las galgas extensométricas (ver Fig. 2, derecha); todas las demás tensiones mecánicas pueden despreciarse. Los puntos con las deformaciones más altas se indican en color rojo. Las zonas coloreadas en azul presentan tensiones mecánicas nulas o muy bajas. Como se puede observar, las deformaciones se concentran en la zona en donde están instaladas las galgas extensométricas. En conjunto, la deformación que produce la carga es muy pequeña. Dado que la rigidez es la relación entre la fuerza y el desplazamiento (es decir, la deformación que produce la aplicación de fuerza), los transductores de fuerza de cizallamiento con simetría radial tienen una rigidez muy elevada o, lo que es lo mismo, una deformación mínima en condiciones de carga.
Para estos transductores de fuerza, HBK utiliza exclusivamente galgas extensométricas de cromo-níquel, en lugar de las habituales galgas extensométricas de constantán. El constantán es un material más económico; sin embargo, el cromo-níquel tiene la ventaja de que ofrece una mayor sensibilidad y una deriva significativamente menor. El punto cero del sensor de fuerza se mantiene muy estable durante mucho tiempo.
Gracias a su mayor sensibilidad y a la existencia de un campo de deformación favorable, la señal de salida es muy elevada, superior a 4 mV/V en muchos modelos. Por tanto, las influencias de la temperatura y la deriva son relativamente bajas.
El diseño permite, además, soldar el sensor, que es hermético y presenta unas propiedades metrológicas excepcionales.
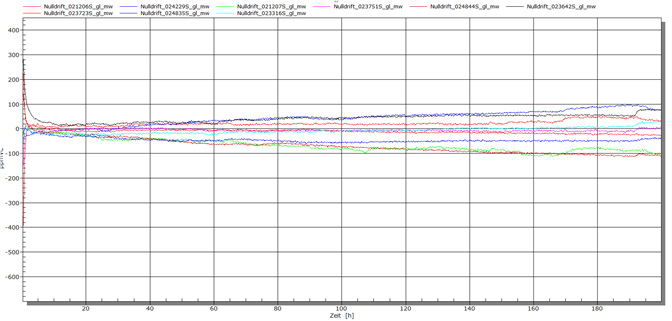
HBK ha realizado pruebas internas muy sofisticadas para caracterizar la estabilidad de los sensores y ha demostrado que la deriva típica del punto cero es de aproximadamente 200 ppm (con respecto al fondo de escala) a lo largo de 700 horas. Después de una deriva inicial, el cambio en la señal del cero de los transductores de fuerza es extremadamente pequeña incluso a altas temperaturas, lo cual, a su vez, permite realizar mediciones de fuerza no adulteradas.
Como ya se ha dicho, los ensayos se llevan a cabo durante tiempos prolongados y en condiciones exigentes. El perfil de requisitos es el siguiente:
El transductor de fuerza de cizallamiento con simetría radial C10 cumple todos estos requisitos.
Rigidez: Los sensores de fuerza de cizallamiento se caracterizan por desplazamientos muy pequeños, de modo que la influencia del sensor en el resultado sea inferior a la del resto de la configuración.
Deriva baja: Los transductores C10 tienen una señal de salida de 4 mV/V. La influencia de la deriva es pequeña, ya que se aplica al fondo de escala. Además, las galgas extensométricas están fabricadas en CrNi y son especialmente estables, lo cual se traduce en una excelente estabilidad del punto cero. A petición, se puede facilitar un informe específico que ayuda a estimar la deriva durante un año.
Insensibilidad a los gradientes de temperatura: Los sensores de fuerza de cizallamiento U10 y C10 de HBK incorporan ocho galgas extensométricas en cada puente. Estas galgas extensométricas están instaladas en cuatro barras de cizalladura (posiciones 1-4 en la Fig. 6). Las galgas extensométricas siempre se instalan en posiciones opuestas dos a dos, de modo que una mida deformación con signo positivo y la otra con signo negativo. La ventaja es que la influencia de la temperatura se compensa en cada uno de los radios, con lo que consigue un sensor altamente insensible a los gradientes de temperatura.
El sellado hermético está garantizado, ya que todos los C10 con fuerzas nominales superiores a 10 kN están soldados y alcanzan el nivel IP68 con la opción de «cable integrado permanentemente» y funcionan de manera estable incluso si se ven afectados por altos niveles de humedad. Los transductores de fuerza C10 se encuentran disponibles con clases de precisión de 0,02 y 0,05, y figuran entre los más precisos de su clase.
Para evaluar la incertidumbre de medición utilizaremos, como ejemplo, un transductor C10 que trabaja a temperatura constante de 40 °C durante 500 días.
El sensor tiene los parámetros siguientes:
Histéresis: 0.04% de F nom
Linealidad: 0,035% de F nom
Error de sensibilidad: 0,1% de la lectura, con la salida nominal ajustada
Coeficiente térmico del punto cero: 0,0750 %/10 K
Coeficiente térmico de sensibilidad: 0,015 %/10 K
Deriva/año: 0,1 %/año, según estudios internos de HBK
Fluencia relativa durante 30 minutos: 0,02% de la lectura
Condiciones de temperatura:
Aplicación de fuerza:
Supongamos una situación en donde la respuesta de fuerza aumenta de forma lineal a lo largo de la prueba, desde un valor inicial de aprox. 100 N hasta un valor final de 100 kN. Se utiliza un transductor de fuerza C10/100KN de HBK.
Por lo tanto, es necesario calcular el error en diferentes puntos del gráfico de respuesta tiempo-fuerza. Para que el ejemplo resulte más sencillo, se asume que el aumento de la fuerza es lineal (0 N el primer día, 100 kN después de 500 días).
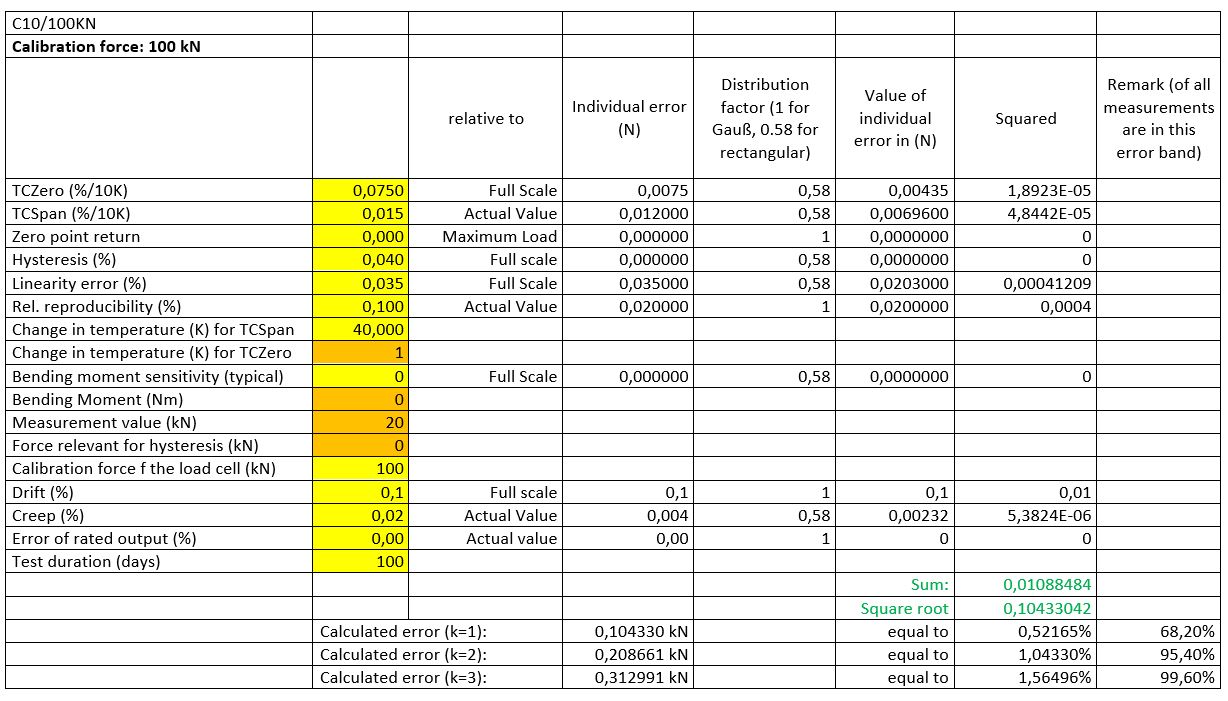
Los errores individuales relevantes se recogen en la tabla de la Figura 7.
Como ejemplo, se presenta el resultado correspondiente al día n.º 100, en el que la fuerza aplicada es de aproximadamente 20 kN.
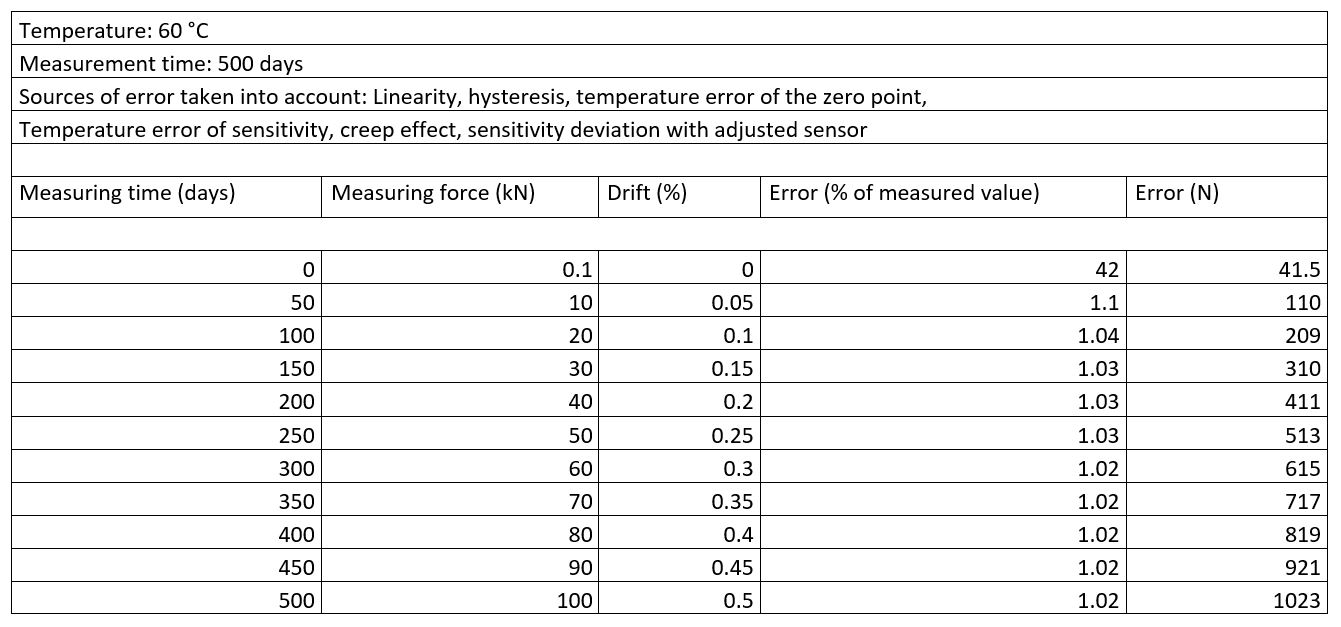
Ahora, este mismo cálculo puede repetirse para todos los puntos de medición. El resultado se presenta en la tabla siguiente (véase la figura 8). Lo más llamativo es que el error de medida es de alrededor del 1% del valor medido, a pesar de que las condiciones de medición son complicadas. Este error se aplica al valor absoluto de la fuerza. Las variaciones de fuerza (por ejemplo, de un ciclo de carga a otro) pueden detectarse con mayor precisión.
Por un lado, la incertidumbre de la medición va aumentando, puesto que la deriva también lo hace. Pero, por otro lado, se va incrementando la fuerza aumenta, con lo que la influencia relativa de la incertidumbre sobre la señal de medida se va reduciendo, en las condiciones de nuestro ejemplo.
Cuando se llevan a cabo mediciones de fuerza de larga duración en baterías eléctricas, el sensor empleado debe cumplir requisitos muy estrictos, puesto que cualquier fallo del transductor de fuerza puede retrasar los proyectos y acarrear costes considerables. Los sensores de fuerza de cizallamiento herméticos, como el C10 de HBK, con una potente señal de salida y una precisión muy alta, cumplen con seguridad los requisitos más exigentes.
Vea la grabación del seminario web sobre las pruebas mecánicas de baterías: Pruebas físicas de una sola célula
La sesión se centra en la medición de la fuerza como herramienta para comprender el envejecimiento de las baterías y los cambios físicos. Se trata de detectar incluso los cambios más pequeños en vigor para obtener información sobre:
O consulte las otras presentaciones de la serie de seminarios web sobre pruebas de baterías.
[1] «Auswirkungen des Ladeprofils auf das Lythio-Plating-Verhalten von Lythio-Ionen-Zellen», Florian Grimsmann, tesis de maestría, Universidad Carl von Ossietzky, Oldenburg (Alemania), págs. 19 y ss.
