O motor elétrico tem uma curva de velocidade de torque muito desejável porque pode não apenas produzir torque máximo na velocidade 0, mas em uma ampla faixa de velocidades. Embora essa capacidade crie novas oportunidades com o motor elétrico, também cria alguns novos desafios em comparação com os motores de combustão interna. Um desses desafios é a oscilação de torque, que tem várias implicações, incluindo controle, potência, ruído, vibração e durabilidade. A oscilação de torque pode ser descrita como a variação do torque de saída conforme o motor gira. Este artigo técnico tem foco na medição desses sinais e suas implicações para ruído e vibração. O documento também incluirá exemplos de alguns estudos de caso que demonstram o impacto da oscilação de torque e seus efeitos no NVH.
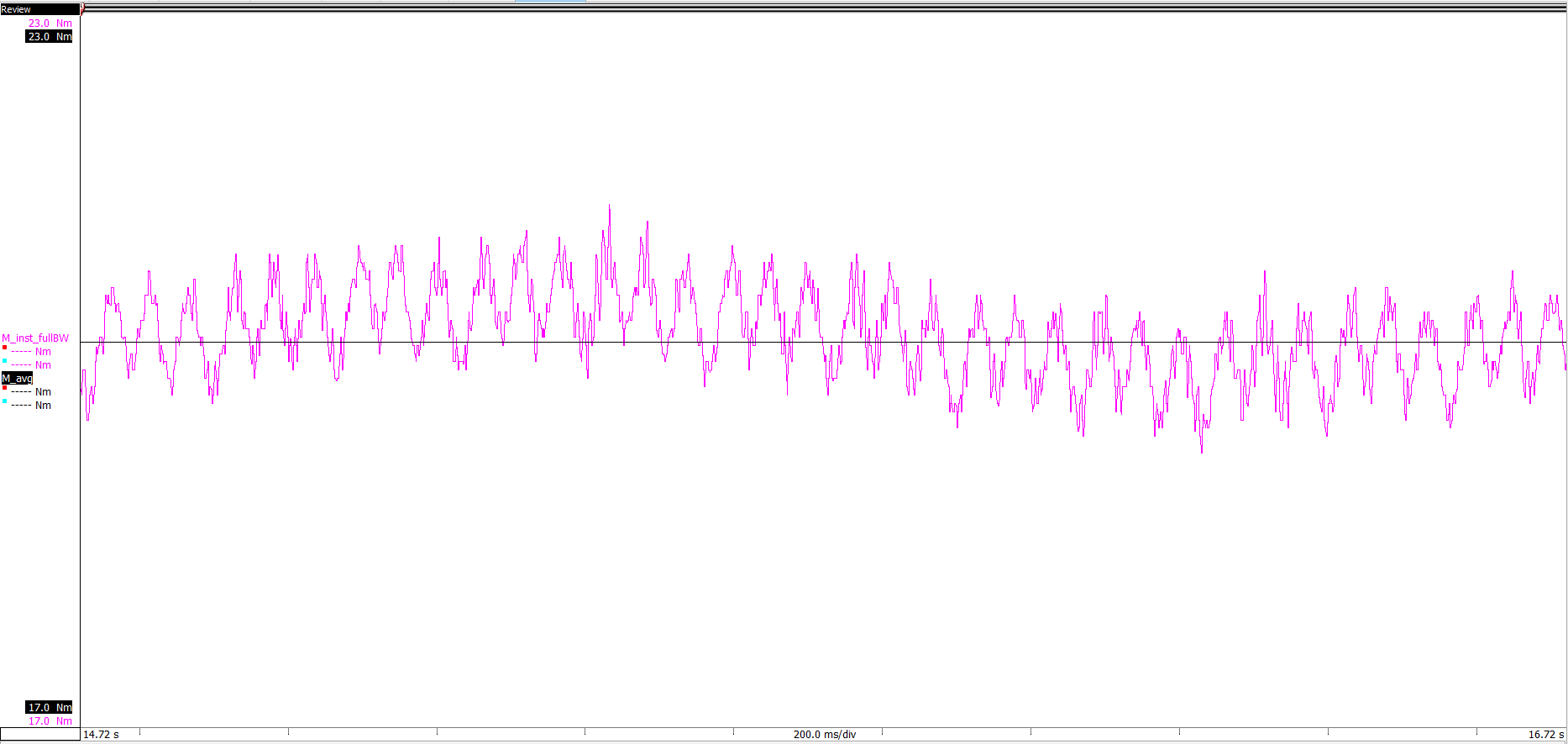
O torque é frequentemente descrito como uma quantidade DC, mas possui um componente de frequência. Especificamente, em motores elétricos, o torque terá uma média DC, com um deslocamento cíclico. Esse deslocamento terá uma frequência que é uma função da velocidade de rotação e uma amplitude que é uma porcentagem do valor DC. Um exemplo de ripple de torque pode ser visto na figura 1, onde o torque médio é DC, mas o torque de alta largura de banda mostra um ripple de aproximadamente +-2Nm. Embora isso possa não parecer um problema significativo, as altas frequências desse ripple podem levar a uma variedade de resultados indesejáveis; incluindo ruído audível, vibrações estruturais e fadiga do engrenagem. Para mitigar o ripple de torque, precisamos entender suas fontes, que incluem excitação elétrica, construção da máquina, ressonâncias mecânicas, alinhamento e carga.
A excitação elétrica da máquina contribui para o ripple de torque porque o torque da máquina seguirá a corrente. O exemplo mais extremo disso é a máquina monofásica, onde haverá torque cíclico a duas vezes a frequência fundamental, e um elemento de torque zero. Ao aumentar as fases, você pode eliminar o cruzamento zero e a amplitude do ripple, mas aumentará a frequência. A máquina típica terá três fases, o que é vantajoso para o ripple de torque, mas não o eliminará.
Uma vez que o torque é criado pela excitação senoidal, o ripple de torque da excitação estará na mesma frequência que o sinal elétrico, o que significa que, à medida que a velocidade aumenta, a frequência do ripple de torque também aumentará. Além disso, outros elementos do ripple de torque estarão presentes, porque a excitação não é uma onda senoidal perfeita. Inversores que operam em alta frequência são frequentemente empregados, e a bobina da máquina afetará a distribuição da corrente. Como resultado, esses problemas criarão um ripple de torque adicional.
A construção é outro exemplo de um fator contribuinte que pode impactar o ripple de torque. Em todas as máquinas, o ripple de torque é impulsionado pela função de enrolamento da máquina, e cada tipo de máquina tem uma contribuição do ripple de torque proveniente da interação dos ímãs do rotor com o ferro do estator. Em máquinas de indução, o ripple de torque é menor em amplitude e pode ser gerenciado com o desvio das barras do rotor. Com o aumento da utilização de máquinas de ímã permanente, é necessário considerar os efeitos dos ímãs no rotor, além da função de enrolamento e do desvio. Os ímãs no rotor atrairão o ferro no estator, e à medida que a máquina gira, os ímãs atrairão cada dente do estator. Uma vez que há um número fixo de ímãs no rotor e slots no estator, esse elemento do ripple de torque também será proporcional à velocidade. A alta amplitude e, potencialmente, altas frequências devido à velocidade da máquina tornam o ripple de torque dos ímãs permanentes um problema difícil de caracterizar e reduzir.
Dado que a excitação e a construção da máquina criam ripple de torque, você também pode usar essas duas características em combinação para aliviá-lo. Diferentes padrões de construção combinados com diferentes tipos de controle de máquina podem ser usados para reduzir o ripple de torque. Avanços em tecnologia de feedback e inversores nos permitem expandir os limites da mitigação do ripple de torque. Para validar que esses métodos de mitigação do ripple de torque funcionam, os engenheiros precisam validar seus projetos com medições.
Faça login agora para baixar este documento.
