


ago 29 2019
Understanding Source of Noise of Electric Engines
Read More
Ao projetar um sistema de acionamento de motor elétrico, não importa qual seja a aplicação, existem três elementos:
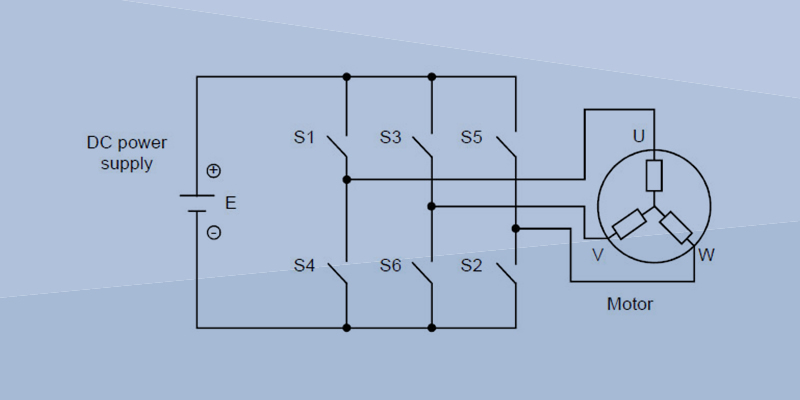
Frequentemente, esses elementos vêm na forma de uma bateria atuando como um Barramento CC - um inversor que transforma a energia CC em energia CA - e um motor que usa a energia CA para converter energia elétrica em energia mecânica. Isso é, muitas vezes, citado como conversão de potência eletromecânica.
Neste artigo, Mitchell Marks explica os fundamentos e requisitos para testar inversores e máquinas elétricas. O que ele gosta sobre esta aplicação:
Os motores dominaram a indústria global por 100 anos sem ter a capacidade para controlá-los, porque eram limpos e confiáveis: bastava conectá-los e eles funcionavam. Agora que temos a habilidade de controlá-los, eles estão sendo integrados em todos os lugares, de celulares a submarinos. Com tantas aplicações, o trabalho nunca acaba e nenhum dia será igual ao outro.”

O controle é algo que todos mantêm em segredo sobre como o fazem especificamente. É um software, portanto, é fácil mantê-lo em sigilo. O controlador irá visualizar o torque e a velocidade e determinará a frequência de chaveamento, o método PWM ( Pulse Width Modulation ) e como otimizar a eficiência. Estes aspectos podem mudar rapidamente ao longo de um ciclo. A maioria dos tipos de controle, independentemente do tipo de motor, são uma versão do FOC ( field-oriented control ). Uma tendência que vem crescendo é o controle de corrente Deadbeat, entretanto, todos os tipos de controle serão controles de corrente em malha fechada. O controle é onde a transformação do quadro de referência direto-quadratura (dq0) ocorrerá. Esta é uma tradução matemática utilizada para visualizar e controlar o PWM trifásico, baseado na necessidade do sistema. Se trata apenas de uma manipulação de seno e cosseno com uma referência de posição, fazendo 3 fases aparecerem como 2 (não trivial).
The history of the math for controlling and understanding the induction machine took about 50 years for people to solve. It is amazing that we were using the machine 50 years before we could understand it!

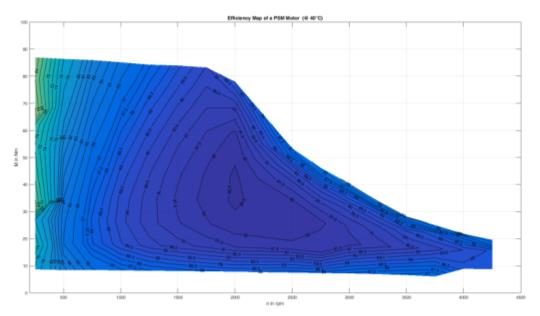
Portanto, temos a escolha da topologia e pequenos detalhes, baseados no esquema de controle que os grupos desejam usar. Também existem escolhas que podem ser feitas com o resfriamento e como os motores são enrolados. Os principais tipos de motor são indução, ímã permanente, campo enrolado e relutância comutável. Os motores de indução são os mais fáceis de controlar, nós os entendemos melhor e eles são verdadeiros cavalos de batalha da indústria. No entanto, a desvantagem é que o campo precisa ser excitado, o que resulta em perdas. Motores de imã permanente (PM) são usados em diversas aplicações onde a eficiência é importante e o tamanho é uma restrição, pois possuem maior densidade de potência porque o imã fornece o campo magnético ao invés de termos perdas no rotor. Também possuem a desvantagem de perda da CPSR ( Constant Power Speed Ratio ) porque o campo não pode ser enfraquecido tão facilmente. Este enfraquecimento é um método de redução do campo magnético do rotor para aumentar a velocidade de um motor. Podemos enfraquecer o campo na Máquina de Indução ou na máquina PM injetando corrente no eixo q. A necessidade de controlar as quantidades da corrente no eixo q (usado para controlar o torque) ou eixo d (usado para controlar o campo do rotor) para o FOC é uma razão pela qual diversos grupos estão interessados em monitorar suas curvas dq0 em tempo real. Com uma máquina PM, muitos aspectos precisam ser levados em conta porque os imãs podem se desmagnetizar durante o enfraquecimento do campo e a força contra eletromotriz precisa ser monitorada. Motores SR ( Synchronous Reluctance ) possuem um rotor muito simples que é simplesmente uma laminação com um padrão específico. Estes motores usam a propriedade de torque de relutância para criar rotação. Estes motores são muito usados em uma variedade de aplicações por conta de sua construção simples, tendo a desvantagem de gerar muito barulho e vibração. Por conta disso, eles só têm sido utilizados em condições específicas. Durante o ensaio destes motores, os pesquisadores estão principalmente interessados em ter um mapa de vibração de onde o torque e a vibração são mais fortes.
Quanto mais resfriado o motor, menor a perda; quanto menor a perda, maior a eficiência.
Além disso, se os ímãs esquentarem demais, eles podem desmagnetizar em certas regiões, o que pode ser muito ruim. Portanto, manter os enrolamentos e interruptores frios é muito importante. Os interruptores terão perdas maiores e também podem explodir se esquentarem demais. Os pesquisadores passam muito tempo buscando alternativas de resfriamento para tornar seus motores mais eficientes. Sistemas de arrefecimento são geralmente de água, óleo ou glicol bombeado e pulverizado nas áreas onde se deseja resfriar. A tensão nos equipamentos de arrefecimento tornou o monitoramento da temperatura do motor uma parte importante da operação e dos testes. Um teste terá termopares para monitorar temperaturas que são registradas ou enviadas para um sistema de controle para desligamento. De posse destes valores registrados, sincronizados com os dados, os pesquisadores podem saber quando e onde ocorreram mudanças de temperatura em reposta a seus comandos. Esta é outra área onde os dados podem ser usados para validação de modelos.
