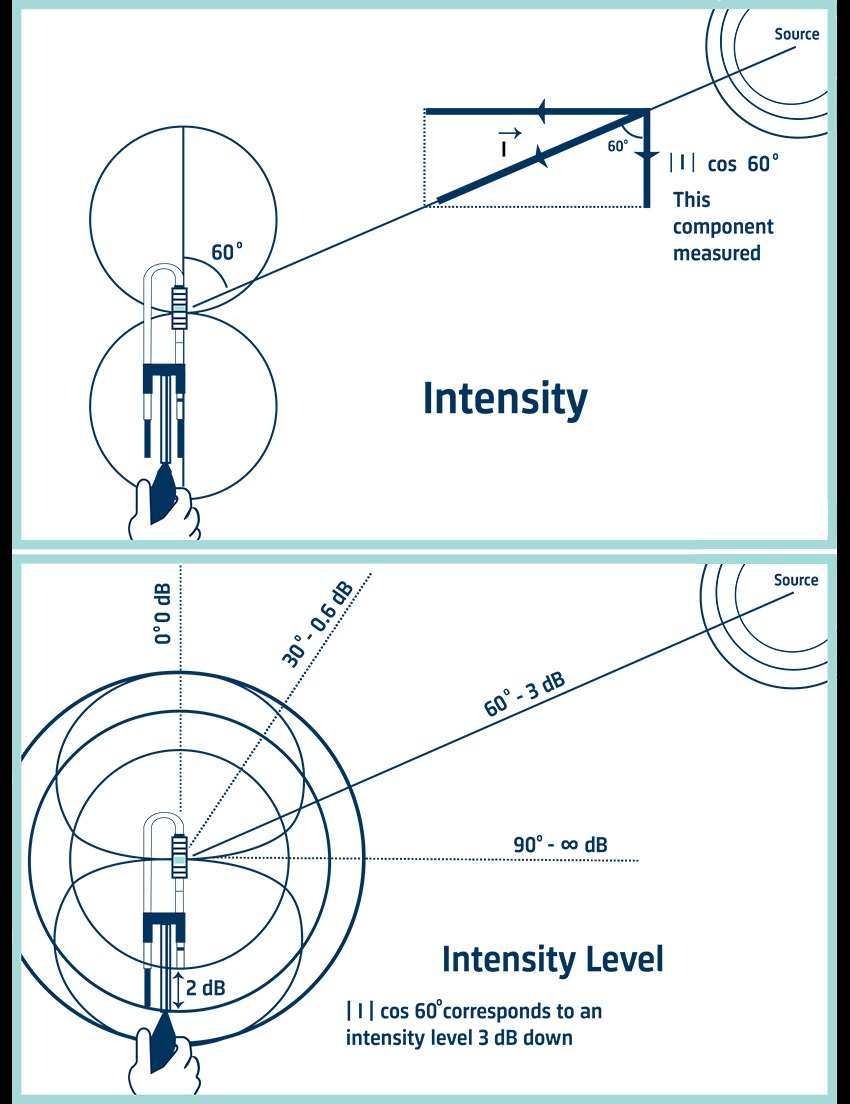
The directivity characteristic for the sound intensity analyzing system looks (two-dimensionally) like a figure-of-eight pattern – known as a cosine characteristic. This is due to the probe and the calculation within the analyzer.
Since pressure is a scalar quantity, a pressure transducer should have an equal response, no matter what the direction of sound incidence (that is, we need an omnidirectional characteristic). In contrast, sound intensity is a vector quantity. With a two-microphone probe, we do not measure the vector however; we measure the component in one direction, along the probe axis. The full vector is made up of three mutually perpendicular components (at 90° to each other) – one for each coordinate direction.