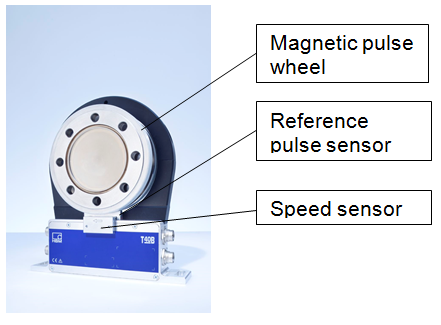
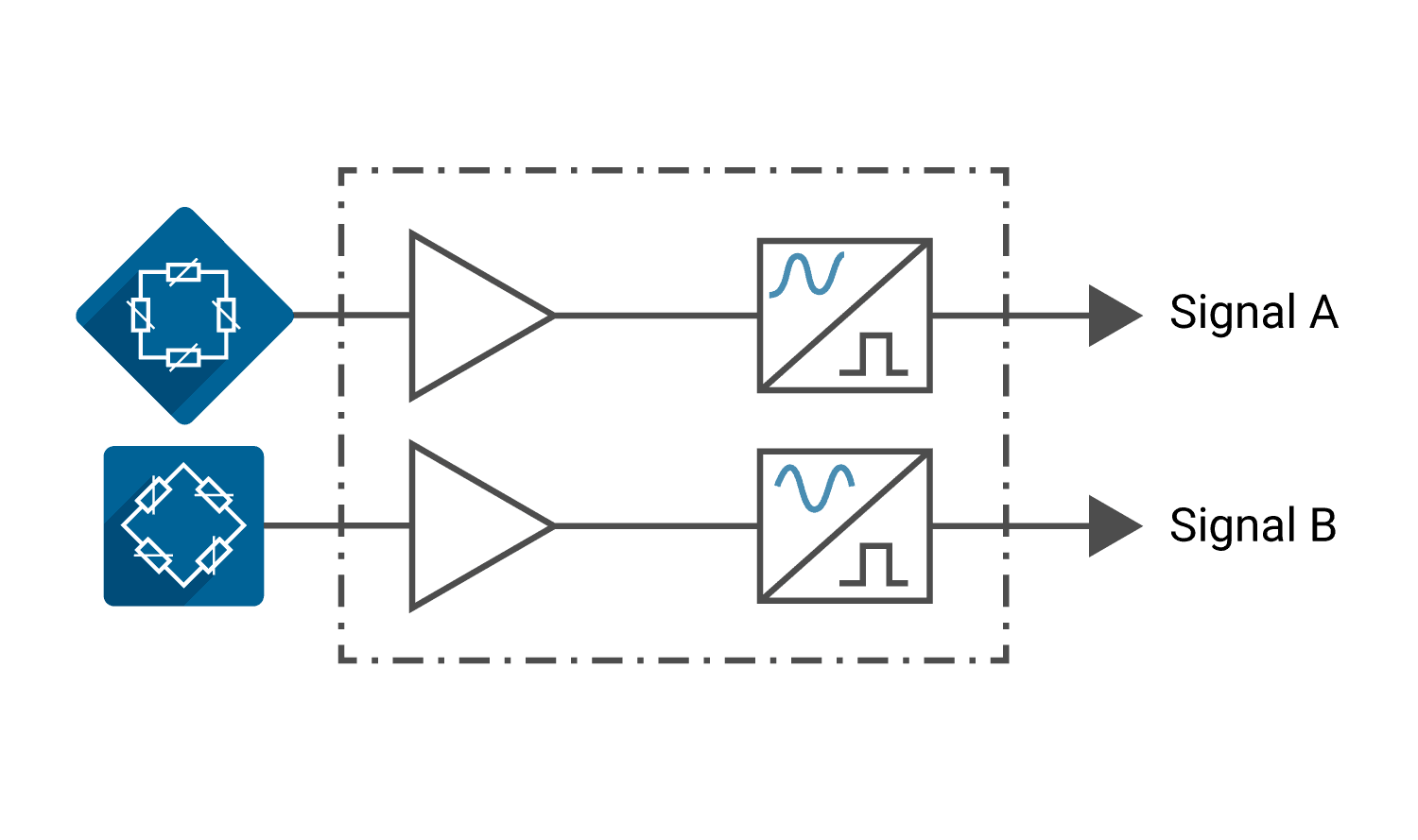
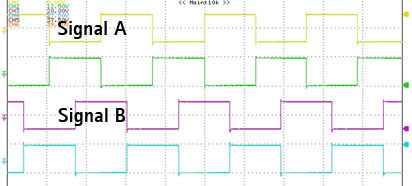
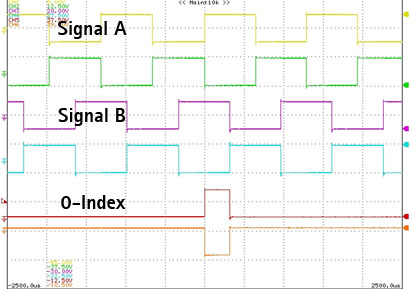
The magnetic incremental encoder generates pulses when the drive train is rotated. The number of pulses per revolution corresponds to the speed or position. The system available is a bi-directional encoder; that is, the AMR sensor used includes two full bridges for signal acquisition. The two bridges are arranged offset from each other by a quarter of a period. The generated sine and cosine signals are digitized by downstream electronics. The periodic sine and cosine signals are further subdivided by interpolation, thereby further increasing the basic resolution by electronic means. This reduces the quantization error; calculation of the input shaft's current rotational speed provides results that are more precise.
This will bring together HBM, Brüel & Kjær, nCode, ReliaSoft, MicroStrain and Discom brands, helping you innovate faster for a cleaner, healthier, and more productive world.
