




Torque
Shop advanced torque sensors to meet your exact needs. Explore precision options with accessories for exceptional torque measurement accuracy
Read More
Torque measurements in automotive applications often present a special challenge. In some applications, there is a preference for covering multiple measuring ranges with only one torque sensor. There are several approaches for a solution to this challenge.
The measuring range of the sensor can be extended electrically or mechanically, for example. In the first case, however, accuracy suffers because factors contributing to measurement uncertainty such as hysteresis, signal noise and the temperature response of the zero point are reinforced with the spread of the measuring range. In the other case the mechanical properties deteriorate due to the highly complex structure of the measuring body.
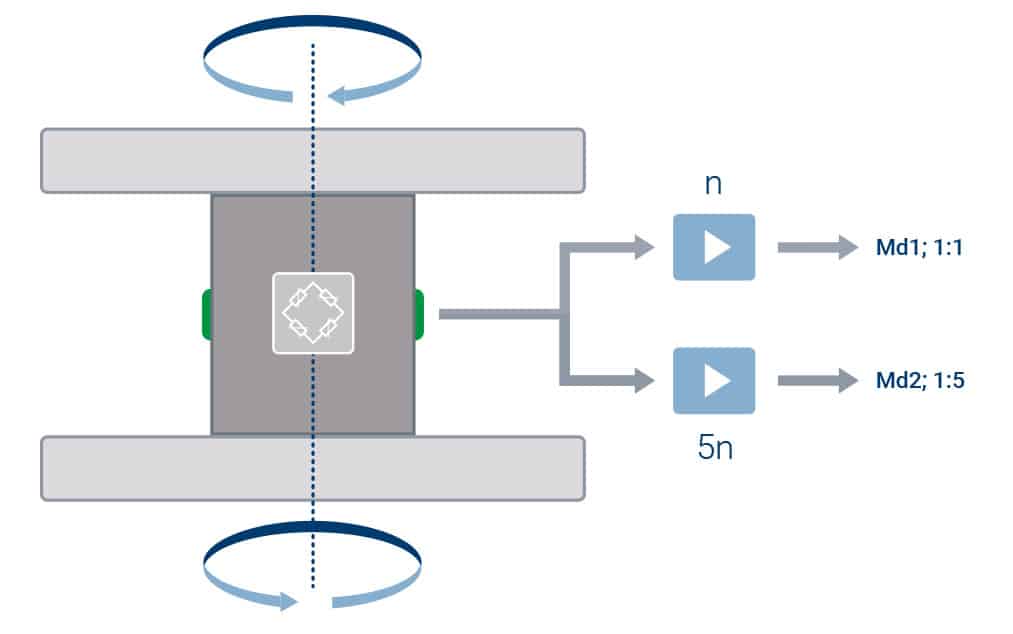
HBK has therefore followed a different approach, developing the T12HP digital torque flange with FlexRange. This sensor covers the entire measurement range with only one spring element, with an enormously high level of accuracy.

Requirements for motors and automotive components – greater energy efficiency, lower consumption and longer ranges – are steadily rising. This also means higher requirements for accuracy in development and research – and thus for testing equipment as well.
Torque measurements are a crucial factor for many testing applications in the automotive industry. This is especially demanding if measuring ranges of different sizes have to be covered during a measuring process, as for example in engine tests. Then a torque sensor has to acquire both high and low torques, depending on the test – with uniform accuracy over the entire measuring range. The main challenge is to achieve a balance between measurement accuracy and error tolerance.
In many applications, for example brake tests, the peak torques that occur are very high in comparison to the average measured torques. The nominal (rated) measuring range of the sensor is dimensioned appropriately to ensure the sensor is not overloaded, damaged or even destroyed by peak torques. Peak torques represent the maximum torque in the application. If a sensor is adjusted to the maximum torque, however, it may possibly be overdimensioned for measuring the other torques that occur during the test. Over-dimensioned sensors have a disadvantage: important data sheet information, which must be used to to evaluate errors, refers to the nominal (rated) measuring range, not to the average measured torque. The relevant error evaluation may therefore produce an unfavorable result because important parameters named in the data sheet such as the temperature response TC0, non-linearity and the hysteresis as well as effects due to parasitic loads generally refer to the nominal (rated) measuring range of the sensor.
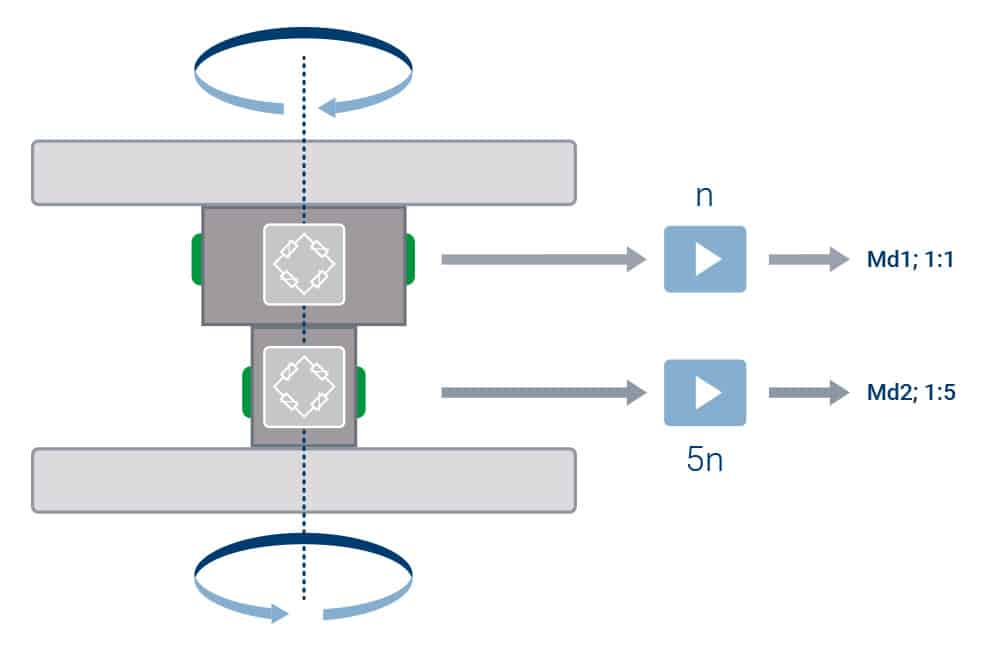
Dual-range torque sensors measure in two torque ranges that differ in size. To do this they have two spring elements or measuring bodies which differ in size and have different nominal (rated) measuring ranges and are connected in series or parallel.
Each of these measuring bodies carries a specially coordinated strain gauge (SG) bridge connected to a measuring amplifier. This makes it possible to determine the material strain of the measuring body, from which the torque can then be derived. Torque transducers of this type are referred to as "true" dual-range transducers. The disadvantage of the variant with the spring elements connected in series is that it is only suitable for static or quasi-static torque measurements.
In dynamic applications, the overload protection of the smaller spring element would lead to signal overlapping. Since the smaller spring element also records the high torques of the larger spring element, it is equipped with mechanical overload protection that removes the connection when torques are too high, transferring the torque to the larger sensor. Without this overload protection there is a danger that the smaller element will be damaged. If the overload protection does engage, however, the result is an unclear signal. That can lead to inaccurate interpretations later when the measurement results are evaluated.
The second, small measuring range often also has a very "soft" design in this arrangement, to be able to generate a sufficiently high characteristic value at low torques. Because of this, the small measuring range responds very sensitively to parasitic loads such as axial forces, which result in crosstalk against the torque and may even damage or destroy the sensor in extreme cases. In another variant of "true" dual-range sensors, the spring elements of different sizes are connected in parallel.
This type makes do without overload protection, thereby also avoiding the interference inherent in signal overlapping. But in this case, as well the smaller spring elements must also record large torques. There is thus a danger that the smaller spring element will be overloaded, leading to plastic deformation. To prevent this, the smaller spring element is designed so that together with the larger measuring body it is able to support the maximum torque. However, this results in too low a characteristic value for the second strain gauge (SG) bridge. The result: Insufficient resolution together with a high level of inaccuracy, including realization of the temperature response.
Every electronic signal includes background noise that is also represented in the measurement. The signal for the smaller measuring range in a dual-range sensor is lower in quality by its very nature, because this signal noise also increases with the amplification.
A comparison of the zero signal noise in the large measuring range (1:1) and in the small one (for example 1:5) shows that the electrical amplification also increases the noise by a factor of about 5. Thus tolerances in the measurement signal are also amplified, for example those due to temperature effects.
The signal noise is low with the T12HP torque sensor because the second, smaller measuring range is not generated by electronic amplification. The high basic accuracy paired with the high resolution of the sensor – FlexRange functionality – covers the entire measuring range. Therefore the signal noise remains low even when the signal strength is low in the lower range.
The temperature affects the measurement accuracy of a sensor. If the measurement signal is amplified for an electrical dual-range sensor, the temperature response of the zero point TC0 also increases. The SG measuring bridge is adjusted to the nominal meas-uring range with the signal intensity factor 1:1. A signal spread with the factor 1:5 also increases the accuracy by a factor of 5 if nothing to the contrary is indicated in the data sheet.
If the temperature response of the larger measuring range is specified as 0.1 %/10K, a subrange full scale value of 0.5 %/10K is accordingly obtained for the second, smaller measuring range. Note also in this case whether a separate value is specified in the data sheet for the temperature response of the second range. If not, the spread in the measurement signal will not result in any corresponding improvement in accuracy.
Thanks to HBK's FlexRange technology, the T12HP is able to cover the entire measuring range with only one amplification. With an extremely low value of only 0.005 %/10K, very high accuracy is achieved even in the subrange.
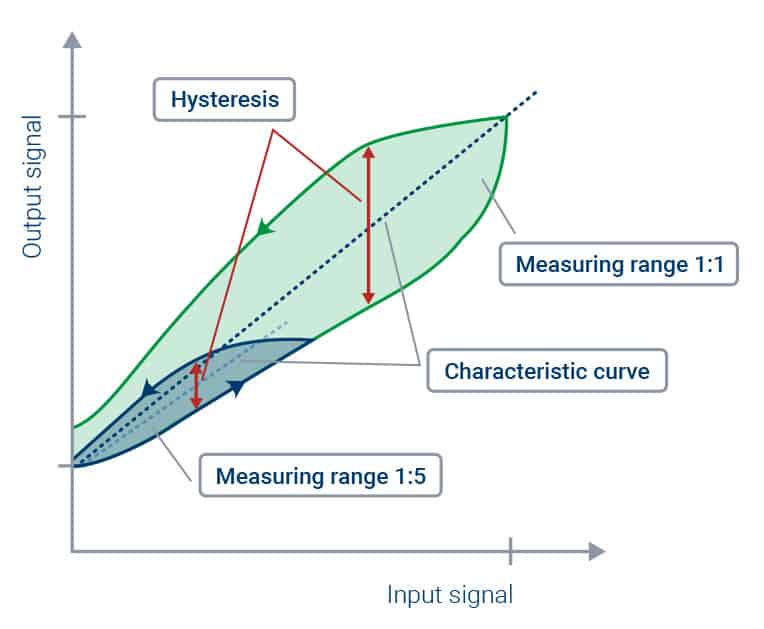
If the characteristic curve of the measurement signal is recorded first with continuously increasing torque and then with identical continuously decreasing torque, the output signals will not match exactly. They will each deviate from the characteristic curve. The maximum deviation between the falling and rising load is referred to as the hysteresis or the relative reversibility error. It depends on the elastic properties of the spring element material and the design of the measuring body.
The quantity of the hysteresis depends on the stress and the strain resulting from it in the measuring body, thus on the maximum torque. If there is a change to the smaller measuring range during a torque measurement, for example a brake test with the brake open and closed, the hysteresis remains "saved" in the spring element due to the high initial load or the strain in the spring element. When the measuring range changes, however, so does the deviation from the characteristic curve – from the large distance to the small one. Because of this there is a gap in the recordded measurement signal curve where the change occurs called the point of discontinuity or the zero point offset.
This error is amplified similarly to the gain factor of the measurement signal. For example, if the relative reversibility error for an electrical dual-range sensor is 0.05 percent of the nominal torque in the large measuring range (1:1), after switching directly to the small measuring range (1:5), an offset error of 0.25 percent of the nominal torque may occur.
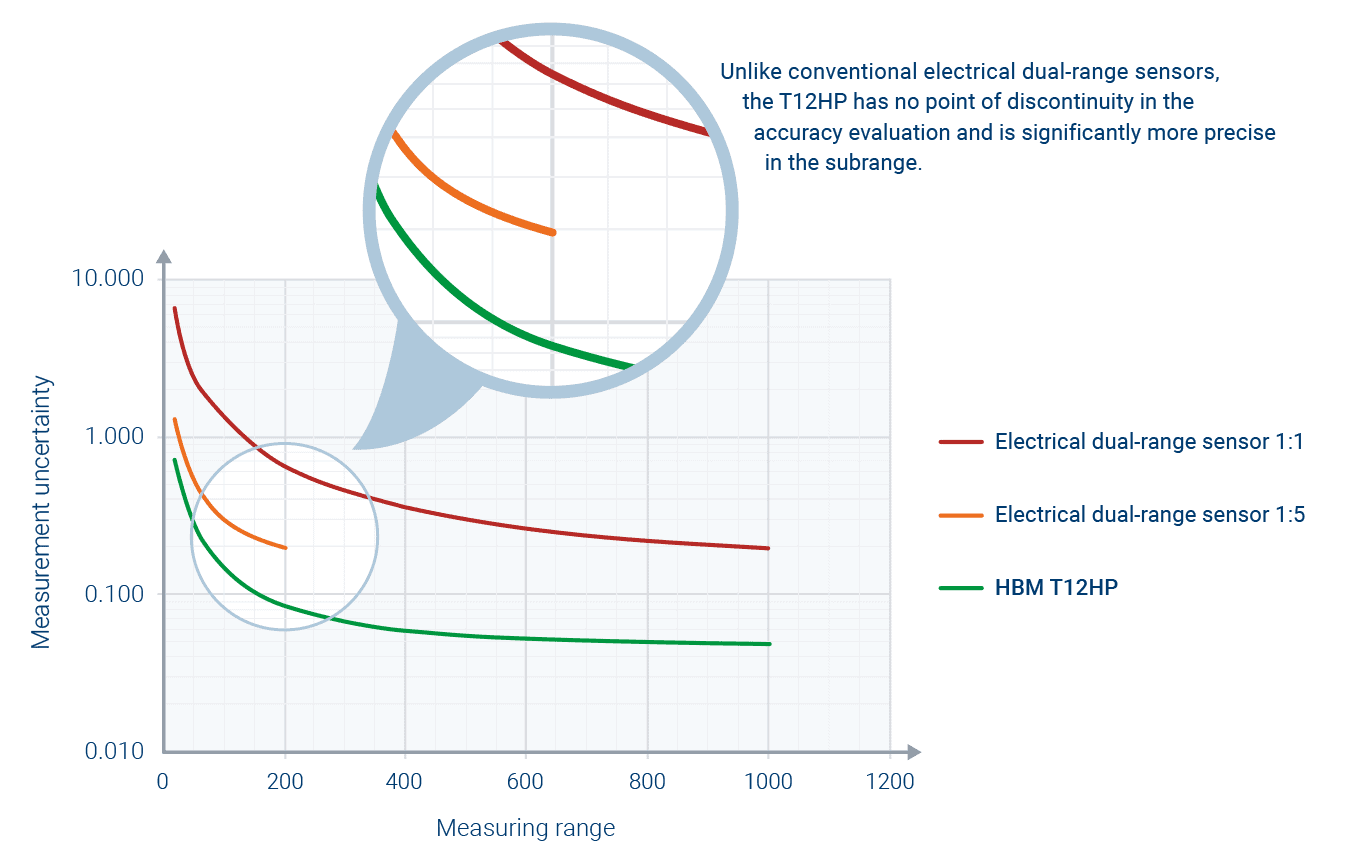
The T12HP torque transducer covers the entire measuring range – and there is no change of measuring range. The FlexRange technology thus allows for one continuous measurement signal and eliminates the point of discontinuity in the application and in the accuracy evaluation. A point of discontinuity always occurs if for example there are different accuracy levels in a dual-range sensor which always depend in their application or interpretation on preloading and thus on the hysteresis.
Axial offsets occur in practically all drivetrain applications depending on design and assembly. This is due partly to tolerances in the dimensional accuracy of the components that are used and alignment problems and partly to other influences such as temperature. The remaining offset can be practically compensated for by the use of compensating couplings.
However, the crosstalk resulting from parasitic loads cannot be compensated for without additional elaborate measurement technology measures. This effect is reduced to a minimum in the T12HP due to the sophisticated geometry of the measuring body and thanks to the very high accuracy and quality of the strain gauge application. The parasitic loads are zero point-relative and spreading the measurement signal in an electrical dual-range sensor multiplies the effect of the loads by the gain factor. These sensors produce large measurement errors in the small measuring range. With a single-range torque sensor like the T12HP, the parasitic loads are manageable.


This will bring together HBM, Brüel & Kjær, nCode, ReliaSoft, and Discom brands, helping you innovate faster for a cleaner, healthier, and more productive world.
This will bring together HBM, Brüel & Kjær, nCode, ReliaSoft, and Discom brands, helping you innovate faster for a cleaner, healthier, and more productive world.
This will bring together HBM, Brüel & Kjær, nCode, ReliaSoft, and Discom brands, helping you innovate faster for a cleaner, healthier, and more productive world.
This will bring together HBM, Brüel & Kjær, nCode, ReliaSoft, and Discom brands, helping you innovate faster for a cleaner, healthier, and more productive world.
This will bring together HBM, Brüel & Kjær, nCode, ReliaSoft, and Discom brands, helping you innovate faster for a cleaner, healthier, and more productive world.
This will bring together HBM, Brüel & Kjær, nCode, ReliaSoft, MicroStrain and Discom brands, helping you innovate faster for a cleaner, healthier, and more productive world.