
ago 29 2019
Strain Measurement Glossary
Read More
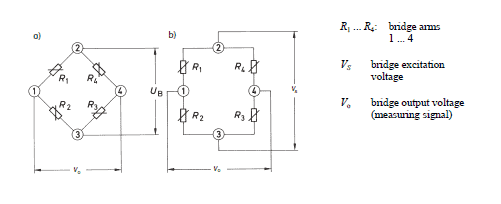
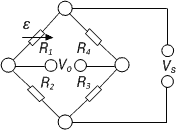
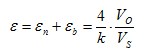
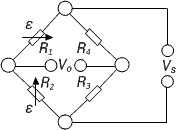
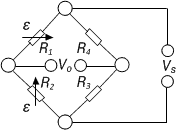
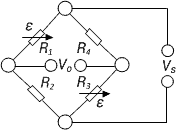
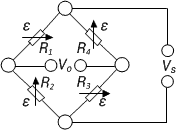
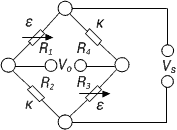
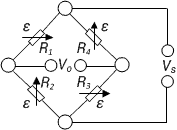
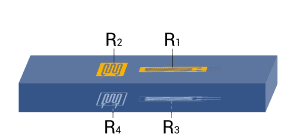
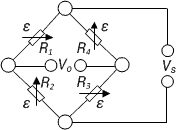
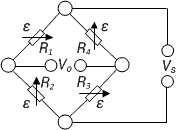
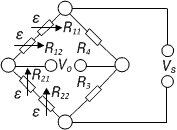
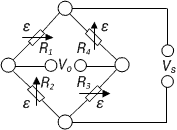
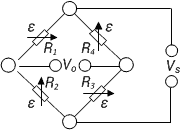
Os quatro braços ou ramos do circuito da ponte são formados pelas resistências R1 a R4. Os pontos de canto 2 e 3 da ponte designam as conexões para a tensão de excitação da ponte Vs ; a tensão de saída da ponte V0 , que é o sinal de medição, está disponível nos pontos de canto 1 e 4.
Nota: Não há regra geralmente aceita para a designação dos componentes e conexões da ponte. Dentro da literatura existente, existem todos os tipos de designações e isso é refletido nas equações da ponte. Portanto, é essencial que as designações e índices utilizados nas equações sejam consideradosjuntamente com suas posições nas redes de pontes, a fim de evitar erros de interpretação.
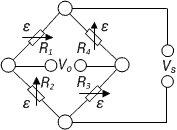
A excitação da ponte é geralmente uma tensão aplicada, estabilizada direta ou alternada Vs. Se uma tensão de alimentação Vs é aplicada aos pontos de alimentação da ponte 2 e 3, então a tensão de alimentação é dividida nas duas metades da ponte R1 , R2 e R4 , R3 como uma relação das resistências da ponte correspondente , ou seja, cada metade da ponte forma um divisor de tensão.
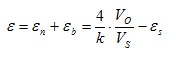
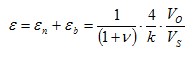
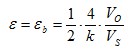
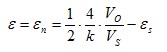
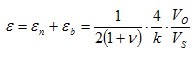
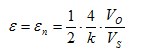
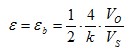
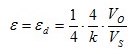
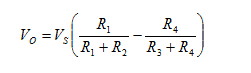
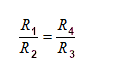
A ponte pode ser desequilibrada, devido à diferença nas tensões das resistências elétricas em R1, R2 e R3 , R4 .Isto pode ser calculado da seguinte maneira:

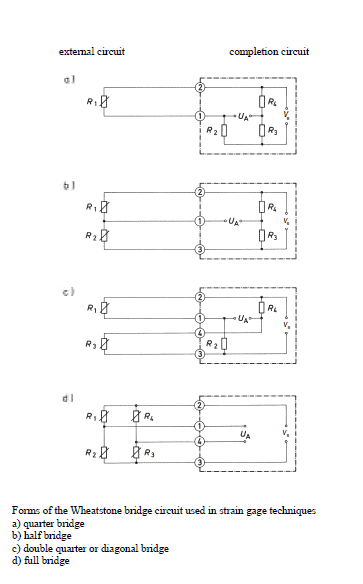
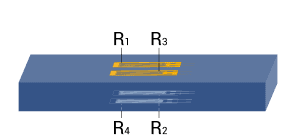
Dependendo da tarefa de medição, um ou mais extensômetros são usados no ponto de medição. Embora designações como ponte completa, meia ponte ou ponte de um quarto sejam usadas para indicar tais arranjos, na verdade elas não estão corretas. Na verdade, o circuito usado para a medição é sempre completo e é total ou parcialmente formado pelos strain gauges e pela amostra. É então completado por resistores fixos, que são incorporados nos instrumentos.
Os transdutores geralmente têm que cumprir requisitos de precisão mais rigorosos do que as medidas referentes a testes experimentais. Portanto, os transdutores devem sempre ter um circuito de ponte completo com strain gauges ativos em todos os quatro braços.
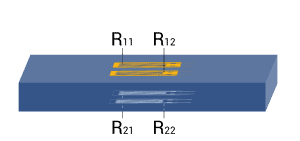
Os circuitos de ponte completa ou de meia ponte também devem ser usados para análise de deformação, se diferentes tipos de interferências precisarem ser eliminadas. Uma condição importante é a de que os casos de diferentes tensões possam ser claramente diferenciados, como tensão de compressão ou tração, bem como forças de flexão, cisalhamento ou torção.
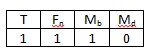
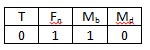
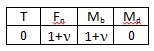
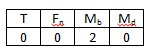
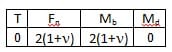
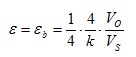
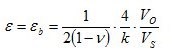
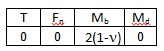
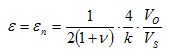
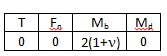
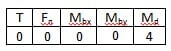
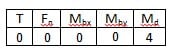
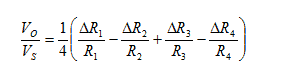
A tabela abaixo mostra a dependência da posição geométrica dos strain gauges, o tipo de circuito de ponte usado e o fator de ponte resultante B para forças normais, momentos fletores, torque e temperaturas. As pequenas tabelas fornecidas para cada exemplo especificam o fator de ponte B para cada tipo de grandeza influente. As equações são usadas para calcular a tensão eficaz de saída do sinal de ponte VS/VS.
|
Bridge configuration |
External impacts measured: |
Application |
Description |
Advantages and disadvantages |
||
| 1 |
|
|
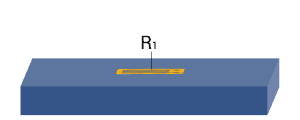
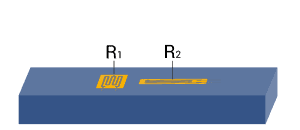
| Strain measurement on a tension/ compression bar Strain measurement on a bending beam | Simple quarter bridge
Simple quarter bridge circuit with one active strain gauge | + Easy installation - Normal and bending strain are superimposed - Temperature effects not automatically compensated |
| 2 |
|
|
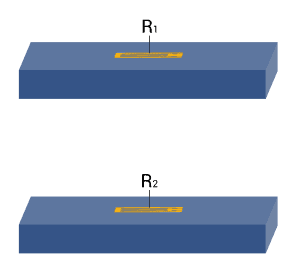
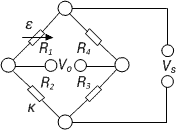
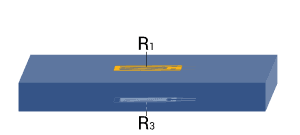
| Strain measurement on a tension/ compression bar Strain measurement on a bending beam | Quarter bridge with an external dummy strain gauge
Two quarter bridge circuits, one actively measures strain, the other is mounted on a passive component made of the same material, which is not strained | + Temperature effects are well compensated - Normal and bending strain cannot be separated (superimposed bending) |
| 3 |
|
|
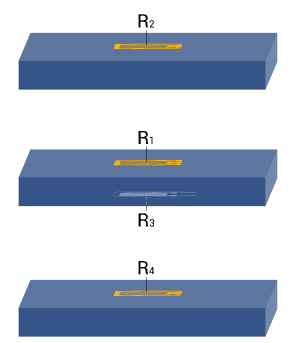
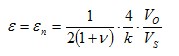
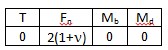
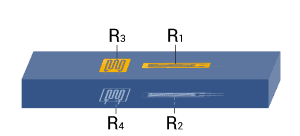
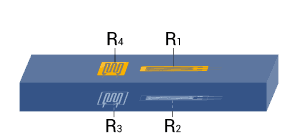
| Strain measurement on a tension/ compression bar Strain measurement on a bending beam | Poisson half-bridge
Two active strain gauges connected as a half bridge, one of them positioned at 90° to the other | + Temperature effects are well compensated when material is isotrop |
| 4 |
|
|
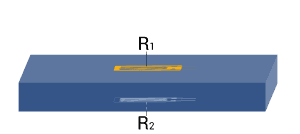
| Strain measurement on a bending beam | Half bridge
Two strain gauges are installed on opposite sides of the structure | + Temperature effects are well compensated + Separation of normal and bending strain (only the bending effect is measured) |
| 5 |
|
|
| Strain measurement on a tension/ compression bar | Diagonal bridge
Two strain gauges are installed on opposite sides of the structure | + Normal strain is measured independently of bending strain (bending is excluded) |
| 6 |
|
|
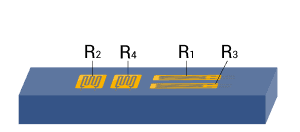
| Strain measurement on a tension/ compression bar Strain measurement on a bending beam | Full bridge
4 strain gauges are installed on one side of the structure as a full bridge | + Temperature effects are well compensated + High output signal and excellent common mode rejection (CMR) - Normal and bending strain cannot be separated (superimposed bending) |
| 7 |
|
|
| Strain measurement on a tension/ compression bar | Diagonal bridge with dummy gauges
Two active strain gauges, two passive strain gauges | + Normal strain is measured independently of bending strain (bending is excluded) + Temperature effects are well compensated |
| 8 |
|
|
| Strain measurement on a bending beam | Full bridge
Four active strain gauges are connected as a full bridge | + Separation of normal and bending strain (only the bending effect is measured) + High output signal and excellent common mode rejection (CMR) +Temperature effects are well compensated |
| 9 |
|
|
| Strain measurement on a tension/ compression bar | Full bridge
Four active strain gauges, two of them rotated by 90° | + Normal strain is measured independently of bending strain (bending is excluded) + Temperature effects are well compensated + High output signal and excellent common mode rejection (CMR) |
| 10 |
|
|
| Strain measurement on a bending beam | Full bridge
Four active strain gauges, two of them rotated by 90° | + Separation of normal and bending strain (only the bending effect is measured) + Excellent common mode rejection (CMR) + Temperature effects are well compensated |
| 11 |
|
|
| Strain measurement on a bending beam | Full bridge
Four active strain gauges, two of them rotated by 90° | + Separation of normal and bending strain (only the bending effect is measured) + High output signal and excellent common mode rejection (CMR) + Temperature effects are well compensated |
| 12 |
|
|
| Strain measurement on a bending beam | Half bridge
Four active strain gauges connected as a half bridge | + Separation of normal and bending strain (only the bending effect is measured) + Temperature effects are well compensated + High output signal and excellent common mode rejection (CMR) |
| 13 | 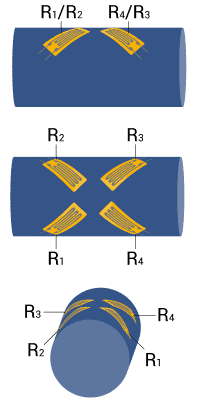 |
|
| Measurement of torsion strain | Full bridge
Four strain gauges are installed, each at an angle of 45° to the main axis as shown | + High output signal and excellent common mode rejection (CMR) + Temperature effects are well compensated |
| 14 | 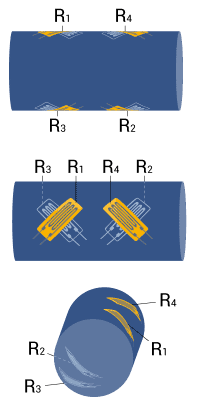 |
|
| Measurement of torsion strain with limited space for installation | Full bridge
Four strain gauges are installed as a full bridge, at an angle of 45° and superimposed (stacked rosettes) | + High output signal and excellent common mode rejection (CMR) + Temperature effects are well compensated |
| 15 | 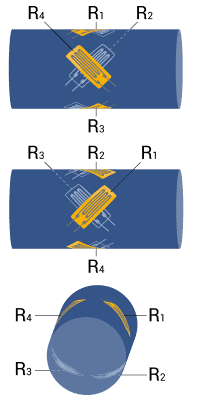 |
|
| Measurement of torsion strain with limited space for installation | Full bridge
Four strain gauges are installed as a full bridge at an angle of 45° and superimposed (stacked rosettes) | + High output signal and excellent common mode rejection (CMR) + Temperature effects are well compensated |
Nota: Um eixo cilíndrico é assumido para medição de torque nos exemplos 13, 14 e 15. Por razões relacionadas à simetria, a flexão na direção X e Y é permitida. As mesmas condições também se aplicam para a barra com seções transversais quadradas ou retangulares.
Explicações dos símbolos:
| T | Temperatura |
| Fn | Força normal longitudinal |
| Mb | Momento de flexão |
| Mbx, Mby | Momento de flexão para direções X e Y |
| Md | Torque |
| εs | Tensão aparente |
| εn | Deformação longitudinal, normal |
| εb | Tensão de flexão |
| εd | Tensão de torque |
| ε | Tensão efetiva no ponto de medição |
| ν | Coeficiente de Poisson |
| Strain gauge ativo | |
| Strain gauge para compensação de temperatura | |
| Resistor ou strain gauge passivo |

Isso reunirá as marcas HBM, Brüel & Kjær, nCode, ReliaSoft e Discom, ajudando o senhor a inovar mais rapidamente para um mundo mais limpo, mais saudável e mais produtivo.
Isso reunirá as marcas HBM, Brüel & Kjær, nCode, ReliaSoft e Discom, ajudando o senhor a inovar mais rapidamente para um mundo mais limpo, mais saudável e mais produtivo.
Isso reunirá as marcas HBM, Brüel & Kjær, nCode, ReliaSoft e Discom, ajudando o senhor a inovar mais rapidamente para um mundo mais limpo, mais saudável e mais produtivo.
Isso reunirá as marcas HBM, Brüel & Kjær, nCode, ReliaSoft e Discom, ajudando o senhor a inovar mais rapidamente para um mundo mais limpo, mais saudável e mais produtivo.
Isso reunirá as marcas HBM, Brüel & Kjær, nCode, ReliaSoft e Discom, ajudando o senhor a inovar mais rapidamente para um mundo mais limpo, mais saudável e mais produtivo.