
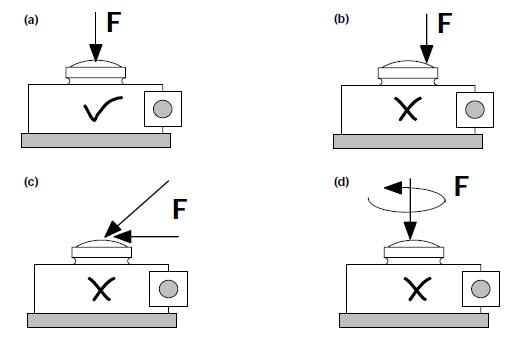
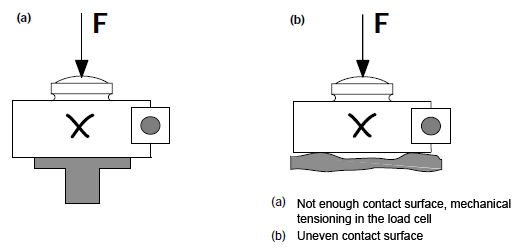
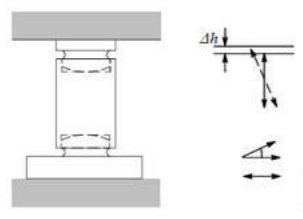
应尽可能避免侧向力和弯曲或扭转力矩。左图显示了称重传感器(a)的正确加载以及一些不正确加载示例。
图像描述:
a) 中心加载
b) 非中心加载
c) 施加非轴向载荷或侧向力
d) 施加力矩(扭转)载荷
称量容器或监控填充状态时, 必须考虑由于温度变化而产生的容器和支架的水平运动。刚性安装附件阻止这一运动,最终产生水平侧向力,致使产生测量误差。这一作用力有时使传感器损坏甚至完全断裂。这种情况可能出现在负荷加载点处,偏心的负荷或斜向负荷可能产生扭力和侧向力,因此需选择能避免温度变形或其他因素引起的水平力的结构。使用安装附件装配传感器的准则,是排除多方面的干扰。因而要求视应用而定选择具体的安装附件。然而说到底,只有对称重技术了如指掌的设计工程师才能确定测量过程中的干扰情况。因此对不同的传感器结构,不光有广泛的负荷导入方式,也有多种安装附件的选择。
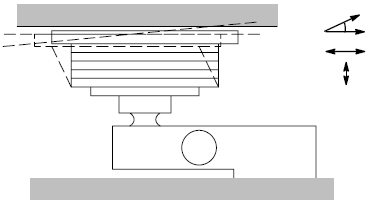
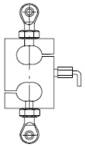
这是对在重量加载偏心时,能自主地回到起始点而设计的传感器,这里利用了稳定平衡的物理特性。作为摆动体的传感器占有负荷引导面,其曲率半径大于传感器高度。对初始位的摇摆导致加载点升高,从而使传感器自归中。
在技术参数表中允许的最大摇摆度,如对C16/40T型,最大为13毫米/5°,此值绝不允许超过,因摇摆过大会损坏传感器和负荷导入点,这个问题可简单地通过调节装配结构的阻挡器到适合的位置来解决。对成本低廉,易于安装而言,上下各一个HBM压头就足够了,防旋转保险装置可阻止轴向的旋转运动。
HBM双摇柱摆式传感器C16的额定负荷为20吨到200吨,它适于中高精度要求。
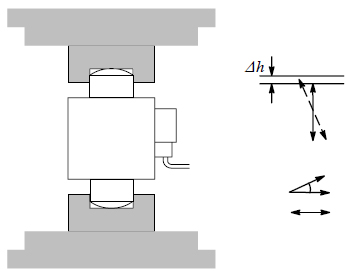
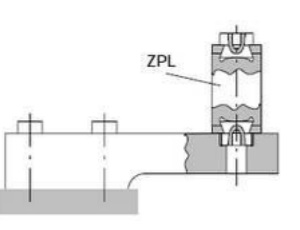
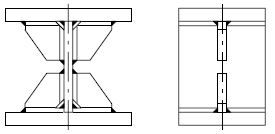
带有摆支承和摆支承座的标准梁式传感器和C系列传感器能达到自归中的性能,这就使制造高精度容器秤成为可能。摆支承的结构形式,能达到3°的偏移而没有明显误差,支承点的水平位移可以被限定在一定范围内。多数ZPL型摆支承由二个支承座和一件柱式支承组成,对ZPS型摆支承仅仅柱式支承和EPO3压头各一个就能满足要求。
摆支承在位移中加载点相对于出发点被略加提高。由此产生回复力,这个回复力使系统回到初始状态,因此摆支承和摆支承座可看成是自归中的。 同时它们被证明是容易安装的,固紧容器或平台的侧面的导杆是不必要的。值得推荐的是通过端头偏移保护来限制侧向偏移。就象应用弹性支承体一样,为了安全的需要,应保证容器有抬升保护和坠落保护。
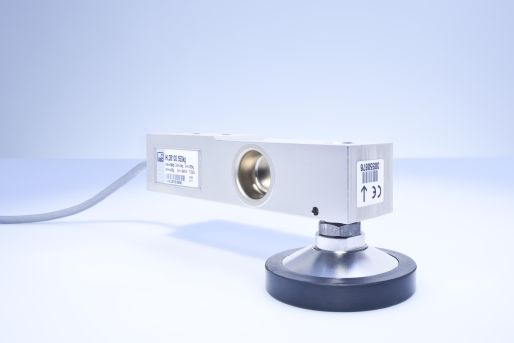
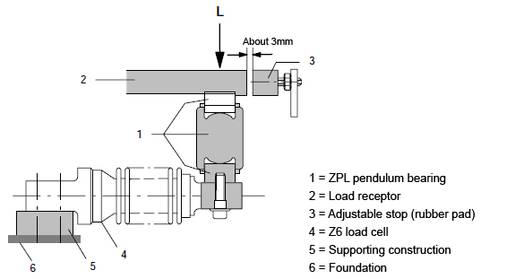
当与平台秤装置一起使用时,脚支撑对于HBK系列HLC称重传感器特别有用。负载通过摇臂销导入,允许移动以补偿天平的不同负载状态和温度变化。负载可以在可调节的高度引入,这使得在安装平台时轻松有效地调节平台的高度。不需要其他约束或安装元件。脚支撑可以使这种类型的平台秤的设计更简单和平坦。由于上述特性,当天平的安装位置发生变化时,经常使用这种类型的系统。
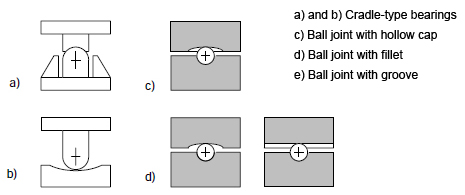
传统的衡器制造以机械秤的结构为最高的精度。对电子衡器,“锥尖”和“锥座”,相当于机械秤的“刀口”。
这一安装附件尤其适应于高精度要求的称重领域。但这种应用对动态负荷或振动是非常敏感的。

回扭机构应用于双弯曲梁传感器中,并使具有拉力或压力负荷在作用在一条直线上。 它的应用限于平台内仅带一个传感器或与两边吊钩一起悬挂的重物。
万向节联结适用于准静态的拉式负荷(负荷频率小于10赫兹),
其他的连接通常利用叉形件,频率更高的动态负荷应该用柔性的易伸缩的柱状体.
如果容器的支承脚上没有全部装有传感器,那么必须安装固定或倾斜支座,在应用固定支座时,可利用现成的构件,图4-9显示了由HBM提供的固定支座,以斜撑支着的双T支架组成、通过斜撑创造了一个很好的柔性区域,固定支座也在水平方向固定住了容器,这一方法也可以不用导向机构。要注意的是,传感器的偏移会引起固定支座微小的弯曲,从而引起测量信号的误差,可这一误差可以通过校准传感器的方法来减小。
| C2 | C2A | C16A | U2A | Z7A | Z6 | RSC | HLC | |
| 推力件 | ||||||||
| 弹性支撑 | ||||||||
| 摆支撑 | ||||||||
| 膝眼 | ||||||||
| 锥尖和锥座 | ||||||||
| 安装模块 | ||||||||
| 脚支撑 | ||||||||
| 上压头 | ||||||||
| 基座 |
固定支撑
对倾斜式支座而言上面描述的测量误差,实际上不会出现,因为这里没有弯曲应力可言,只发生细微的滚动摩擦,但是倾斜支座的水平偏移,远小于固定支座的,因此根据应用场合不同可能需要
只有在精度要求不高且储罐中重心位置仅水平变化的情况下,才建议使用固定轴承和摇臂轴承。这主要适用于液体和自由流动介质。
摇臂支撑
储罐称重装置的设计基于称重传感器,称重传感器可以通过适当的安装辅助装置进行移动,也可以自行移动。根据其机械原理,安装辅助装置在一定程度上可以自复位。机械保护器保护的是最大允许的侧向偏移。例如角度阻挡器,或橡胶缓冲是有效的。
若容器重心位于承载点之上,且同时不能排除风及其他外力影响,则容器也应针对倾倒或抬升加以保护。
这可设计两级保护或设计特别的反向抬升保护,例如,抬升保护可以在承载点附近垂直加入螺旋杆加以实现。在容器方面螺栓杆悬空地通过加载称体的钻孔伸入。其保护间隙是通过位于螺杆上的螺母调节的,通过在加载称体中钻孔的大小,通常也可限制最大侧向位移。
在使用非回位作用的多球支座或类似的元件时值得推荐的是以导杆固定容器。导杆的尺寸和结构设计成能传递测量力。并使在测量方向上阻止容器运动的力尽可能的小,导杆有下列形式:
张弦:
它们不传递垂直力,并以此很好地避免外力的影响。
螺栓导杆:
它们在轴向方向产生与平衡水平力相应的反作用力,因此一个导杆必须两端同时使用螺栓。
扁棍导杆
对水平的位移产生轴向力而对垂直的偏移引起了弯曲,它容易产生附加力。但是即使在大截面和双面张紧使用时由于扁棍弯曲而产生的附加力的影响也是小的,但校准时必须注意附加力的作用。
对于称重系统的动态特性,特别建议使用对称夹紧和螺纹连接(顶部和底部)夹紧撑杆,以便在重复加载时弯曲距离相同。
销子导杆:
销子导杆在垂直方向产生极小的附加力,然而导杆小小的的倾斜即能引起夹紧,以此产生摩擦力,并形成垂直方向的附加力影响。因而装配中要求细心的定向工作,此外,在系紧容器,应确保不出现任何导致销子导杆倾斜的位移。
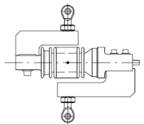
带万向节的螺栓导杆:
带铰链头的螺栓导杆与销子导杆具有同样的作用。然而由于万向节轴承可以向各个方向自由旋转,能避免倾斜。所以装配时只要水平校准导杆,这类带万向节的螺栓导杆对于容器结构的制造和装配误差要求较松。
但导杆必须对万向节轴承进行保护,防止锁死,尤其当它暴露在户外。
在最终安装位置,杆端轴承应偏移90°(与图4-18所示相反),以便它们相互偏移地集成到结构中。
This will bring together HBM, Brüel & Kjær, nCode, ReliaSoft, and Discom brands, helping you innovate faster for a cleaner, healthier, and more productive world.
This will bring together HBM, Brüel & Kjær, nCode, ReliaSoft, and Discom brands, helping you innovate faster for a cleaner, healthier, and more productive world.
This will bring together HBM, Brüel & Kjær, nCode, ReliaSoft, and Discom brands, helping you innovate faster for a cleaner, healthier, and more productive world.