
ago 29 2019
Strain Gauge Fundamentals
Read More
Como desenvolver um pé sensorial passivo e com custo otimizado para robôs que suportam carga?
Como desenvolver um pé sensorial passivo e com custo otimizado para robôs que suportam carga? Esta questão de pesquisa foi abordada como parte de um projeto de robótica do Departamento de Simulação, Otimização de Sistemas e Robótica da Universidade Técnica de Darmstadt.
Com a ajuda de medidores de tensão HBM para transdutores, um sensor de força de 3 eixos foi desenvolvido para regular o controle de movimento do robô.
Desafio:
Desenvolvimento de um pé sensorial passivo para robôs portadores de carga com melhor custo-benefício do que os sensores disponíveis no mercado.
Solução:
Com base nos medidores de deformação da HBM para transdutores, um sensor de força de 3 eixos foi desenvolvido para regular o controle de movimento dos robôs que suportam cargas. Devido a uma camada adesiva pré-revestida, o processamento dos medidores de tensão não apenas foi muito fácil e otimizado, mas também apresentou resultados muito bons.
Resultados:
12 strain gauges da HBM para transdutores foram conectados a pontes completas para medir até mesmo a menor alteração de resistência. Os resultados consideráveis do primeiro teste serão otimizados ainda mais em um projeto consecutivo.
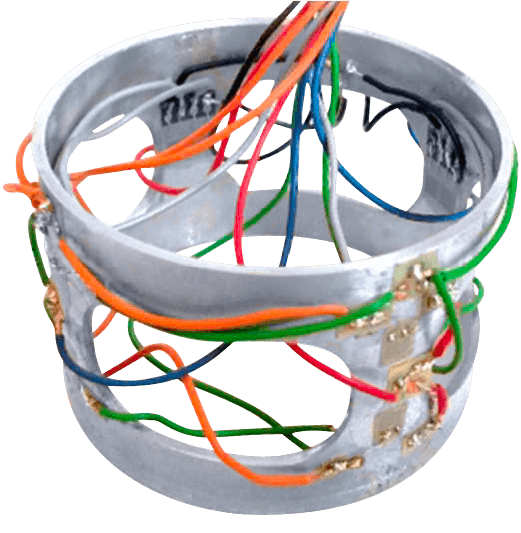
O sensor de força de 3 eixos é baseado em um componente flexível de alumínio em uma estrutura de viga cilíndrica. Essa configuração é fácil de produzir e econômica.
Para medir as forças nas direções x, y e z, três pontes completas de extensômetro foram instaladas:
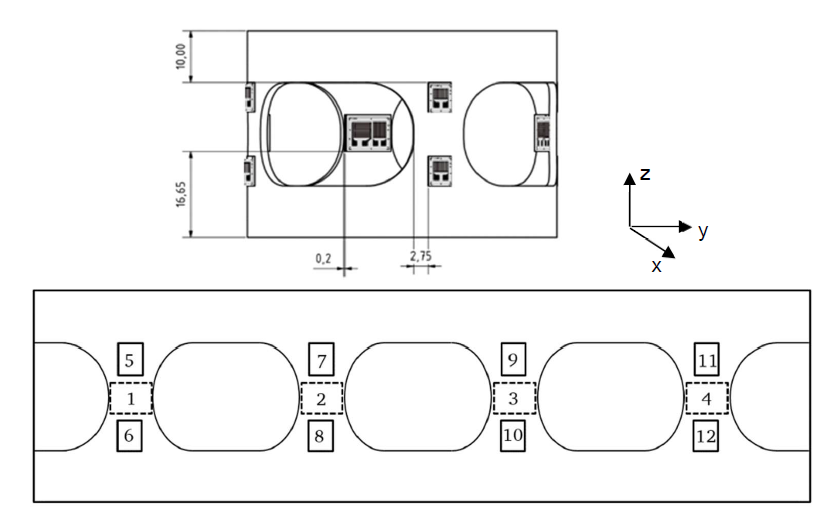
Os medidores de tensão estão dispostos conforme demonstrado na figura 1. Os extensômetros número 1-4 medem a direção z, os extensômetros 5-12 medem as direções x e y.
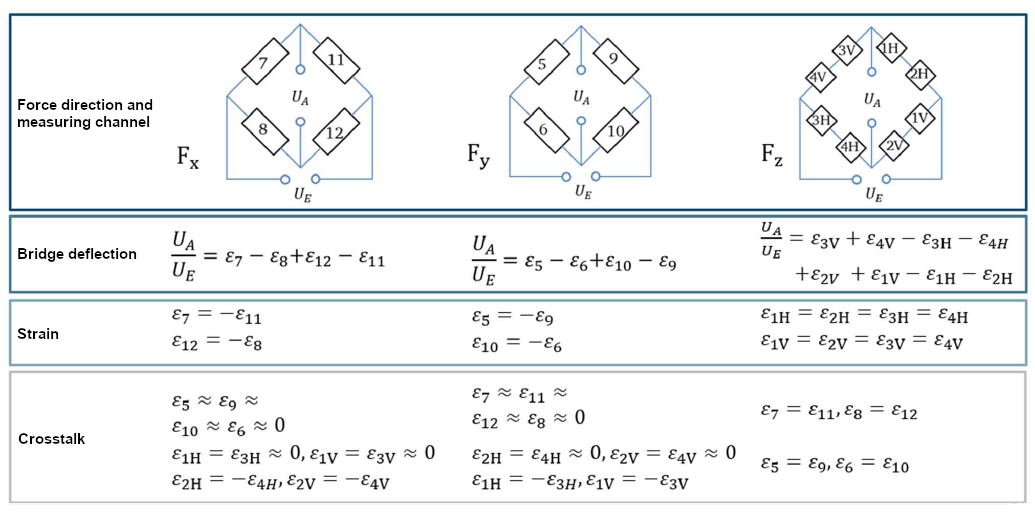
Para medir até as menores alterações de resistência, os medidores de tensão foram conectados a pontes completas (consulte a figura 2). Assim, é possível visualizar a deflexão da ponte. Com a ajuda do ANSYS Workbench 19.1, a deformação qualitativa dos extensômetros foi determinada para a direção de força especificada.
Para verificar o sensor de força de 3 eixos, foi desenvolvido um protótipo. Este protótipo foi avaliado e calibrado em um primeiro teste. Com a ajuda dos dispositivos de calibração, o corpo da mola é carregado um após o outro nas três direções de força.
As condições de calibração para a entrada e saída foram as seguintes:
| Canal-x de sinal zero (mV) | 11.42 |
| Canal-y de sinal zero (mV) | 5.13 |
| Canal-z de sinal zero (mV) | -28.90 |
| Tensão de alimentação (corrente DC em V) | 3.3 |
| Amplificador | ADS1262 |
| Faixa de Medição (V) | +/- 0.156 |
| Fator de ganho do canal x | 16 |
| Fator de ganho do canal y | 16 |
| Fator de ganho do canal z | 16 |
As curvas de medição calibradas são mostradas nos gráficos laranja, verde e preto. Como um valor de comparação, a medição da força de referência também é mostrada nos gráficos azuis.
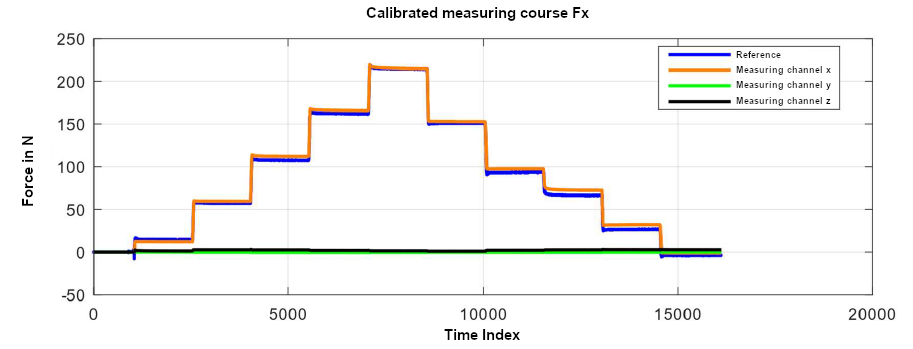
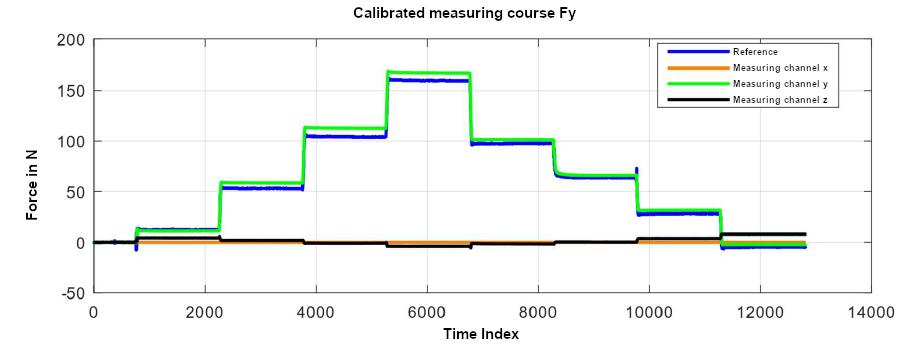
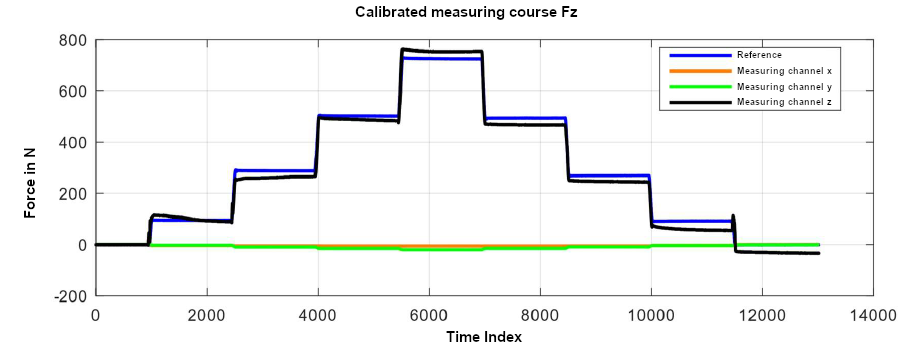
Desvio médio absoluto do sensor de referência e erro relativo médio:
| Direção da força | Desvio médio absoluto (N) | Erro relativo médio (%) |
| Fx | Aproximadamente. 3 | Aproximadamente. 1,5 |
| Fy | Aproximadamente. 4 | Aproximadamente. 2,6 |
| Fz | Aproximadamente. 23 | Aproximadamente. 3,1 |
Os resultados do primeiro teste mostram claramente que resultados consideráveis já foram alcançados com os strain gauges padrão da HBM. Para otimizar ainda mais os resultados do desvio absoluto médio e do erro relativo médio, um projeto de acompanhamento está sendo conduzido na Universidade Técnica de Darmstadt.
A Universidade Técnica de Darmstadt é uma das universidades técnicas líderes na Alemanha, com grande visibilidade e reputação internacional. Desde a sua fundação em 1877, a Universidade Técnica de Darmstadt tem se caracterizado por um espírito pioneiro especial. Por meio de notáveis realizações em pesquisa, a Universidade Técnica de Darmstadt abre importantes campos científicos do futuro.

Isso reunirá as marcas HBM, Brüel & Kjær, nCode, ReliaSoft e Discom, ajudando o senhor a inovar mais rapidamente para um mundo mais limpo, mais saudável e mais produtivo.
Isso reunirá as marcas HBM, Brüel & Kjær, nCode, ReliaSoft e Discom, ajudando o senhor a inovar mais rapidamente para um mundo mais limpo, mais saudável e mais produtivo.
Isso reunirá as marcas HBM, Brüel & Kjær, nCode, ReliaSoft e Discom, ajudando o senhor a inovar mais rapidamente para um mundo mais limpo, mais saudável e mais produtivo.
Isso reunirá as marcas HBM, Brüel & Kjær, nCode, ReliaSoft e Discom, ajudando o senhor a inovar mais rapidamente para um mundo mais limpo, mais saudável e mais produtivo.
Isso reunirá as marcas HBM, Brüel & Kjær, nCode, ReliaSoft e Discom, ajudando o senhor a inovar mais rapidamente para um mundo mais limpo, mais saudável e mais produtivo.